 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRule-Based Spatial Mixture-of-Experts U-Net for Explainable Edge Detection
Feb 04, 2026Deep learning models like U-Net and its variants, have established state-of-the-art performance in edge detection tasks and are used by Generative AI services world-wide for their image generation models. However, their decision-making processes remain opaque, operating as "black boxes" that obscure the rationale behind specific boundary predictions. This lack of transparency is a critical barrier in safety-critical applications where verification is mandatory. To bridge the gap between high-performance deep learning and interpretable logic, we propose the Rule-Based Spatial Mixture-of-Experts U-Net (sMoE U-Net). Our architecture introduces two key innovations: (1) Spatially-Adaptive Mixture-of-Experts (sMoE) blocks integrated into the decoder skip connections, which dynamically gate between "Context" (smooth) and "Boundary" (sharp) experts based on local feature statistics; and (2) a Takagi-Sugeno-Kang (TSK) Fuzzy Head that replaces the standard classification layer. This fuzzy head fuses deep semantic features with heuristic edge signals using explicit IF-THEN rules. We evaluate our method on the BSDS500 benchmark, achieving an Optimal Dataset Scale (ODS) F-score of 0.7628, effectively matching purely deep baselines like HED (0.7688) while outperforming the standard U-Net (0.7437). Crucially, our model provides pixel-level explainability through "Rule Firing Maps" and "Strategy Maps," allowing users to visualize whether an edge was detected due to strong gradients, high semantic confidence, or specific logical rule combinations.
Comparative of Genetic Fuzzy regression techniques for aeroacoustic phenomenons
May 29, 2025This study investigates the application of Genetic Fuzzy Systems (GFS) to model the self-noise generated by airfoils, a key issue in aeroaccoustics with significant implications for aerospace, automotive and drone applications. Using the publicly available Airfoil Self Noise dataset, various Fuzzy regression strategies are explored and compared. The paper evaluates a brute force Takagi Sugeno Kang (TSK) fuzzy system with high rule density, a cascading Geneti Fuzzy Tree (GFT) architecture and a novel clustered approach based on Fuzzy C-means (FCM) to reduce the model's complexity. This highlights the viability of clustering assisted fuzzy inference as an effective regression tool for complex aero accoustic phenomena. Keywords : Fuzzy logic, Regression, Cascading systems, Clustering and AI.
A Gradient-Optimized TSK Fuzzy Framework for Explainable Phishing Detection
Apr 25, 2025Phishing attacks represent an increasingly sophisticated and pervasive threat to individuals and organizations, causing significant financial losses, identity theft, and severe damage to institutional reputations. Existing phishing detection methods often struggle to simultaneously achieve high accuracy and explainability, either failing to detect novel attacks or operating as opaque black-box models. To address this critical gap, we propose a novel phishing URL detection system based on a first-order Takagi-Sugeno-Kang (TSK) fuzzy inference model optimized through gradient-based techniques. Our approach intelligently combines the interpretability and human-like reasoning capabilities of fuzzy logic with the precision and adaptability provided by gradient optimization methods, specifically leveraging the Adam optimizer for efficient parameter tuning. Experiments conducted using a comprehensive dataset of over 235,000 URLs demonstrate rapid convergence, exceptional predictive performance (accuracy averaging 99.95% across 5 cross-validation folds, with a perfect AUC i.e. 1.00). Furthermore, optimized fuzzy rules and membership functions improve interoperability, clearly indicating how the model makes decisions - an essential feature for cybersecurity applications. This high-performance, transparent, and interpretable phishing detection framework significantly advances current cybersecurity defenses, providing practitioners with accurate and explainable decision-making tools.
Fuzzy-RRT for Obstacle Avoidance in a 2-DOF Semi-Autonomous Surgical Robotic Arm
Apr 24, 2025AI-driven semi-autonomous robotic surgery is essential for addressing the medical challenges of long-duration interplanetary missions, where limited crew sizes and communication delays restrict traditional surgical approaches. Current robotic surgery systems require full surgeon control, demanding extensive expertise and limiting feasibility in space. We propose a novel adaptation of the Fuzzy Rapidly-exploring Random Tree algorithm for obstacle avoidance and collaborative control in a two-degree-of-freedom robotic arm modeled on the Miniaturized Robotic-Assisted surgical system. It was found that the Fuzzy Rapidly-exploring Random Tree algorithm resulted in an 743 percent improvement to path search time and 43 percent improvement to path cost.
Gradient-Optimized Fuzzy Classifier: A Benchmark Study Against State-of-the-Art Models
Apr 22, 2025This paper presents a performance benchmarking study of a Gradient-Optimized Fuzzy Inference System (GF) classifier against several state-of-the-art machine learning models, including Random Forest, XGBoost, Logistic Regression, Support Vector Machines, and Neural Networks. The evaluation was conducted across five datasets from the UCI Machine Learning Repository, each chosen for their diversity in input types, class distributions, and classification complexity. Unlike traditional Fuzzy Inference Systems that rely on derivative-free optimization methods, the GF leverages gradient descent to significantly improving training efficiency and predictive performance. Results demonstrate that the GF model achieved competitive, and in several cases superior, classification accuracy while maintaining high precision and exceptionally low training times. In particular, the GF exhibited strong consistency across folds and datasets, underscoring its robustness in handling noisy data and variable feature sets. These findings support the potential of gradient optimized fuzzy systems as interpretable, efficient, and adaptable alternatives to more complex deep learning models in supervised learning tasks.
Fuzzy Logic -- Based Scheduling System for Part-Time Workforce
Apr 21, 2025This paper explores the application of genetic fuzzy systems to efficiently generate schedules for a team of part-time student workers at a university. Given the preferred number of working hours and availability of employees, our model generates feasible solutions considering various factors, such as maximum weekly hours, required number of workers on duty, and the preferred number of working hours. The algorithm is trained and tested with availability data collected from students at the University of Cincinnati. The results demonstrate the algorithm's efficiency in producing schedules that meet operational criteria and its robustness in understaffed conditions.
Jailbreak Detection in Clinical Training LLMs Using Feature-Based Predictive Models
Apr 21, 2025


Jailbreaking in Large Language Models (LLMs) threatens their safe use in sensitive domains like education by allowing users to bypass ethical safeguards. This study focuses on detecting jailbreaks in 2-Sigma, a clinical education platform that simulates patient interactions using LLMs. We annotated over 2,300 prompts across 158 conversations using four linguistic variables shown to correlate strongly with jailbreak behavior. The extracted features were used to train several predictive models, including Decision Trees, Fuzzy Logic-based classifiers, Boosting methods, and Logistic Regression. Results show that feature-based predictive models consistently outperformed Prompt Engineering, with the Fuzzy Decision Tree achieving the best overall performance. Our findings demonstrate that linguistic-feature-based models are effective and explainable alternatives for jailbreak detection. We suggest future work explore hybrid frameworks that integrate prompt-based flexibility with rule-based robustness for real-time, spectrum-based jailbreak monitoring in educational LLMs.
A Genetic Fuzzy-Enabled Framework on Robotic Manipulation for In-Space Servicing
Apr 21, 2025



Automation of robotic systems for servicing in cislunar space is becoming extremely important as the number of satellites in orbit increases. Safety is critical in performing satellite maintenance, so the control techniques utilized must be trusted in addition to being highly efficient. In this work, Genetic Fuzzy Trees are combined with the widely used LQR control scheme via Thales' TrUE AI Toolkit to create a trusted and efficient controller for a two-degree-of-freedom planar robotic manipulator that would theoretically be used to perform satellite maintenance. It was found that Genetic Fuzzy-LQR is 18.5% more performant than optimal LQR on average, and that it is incredibly robust to uncertainty.
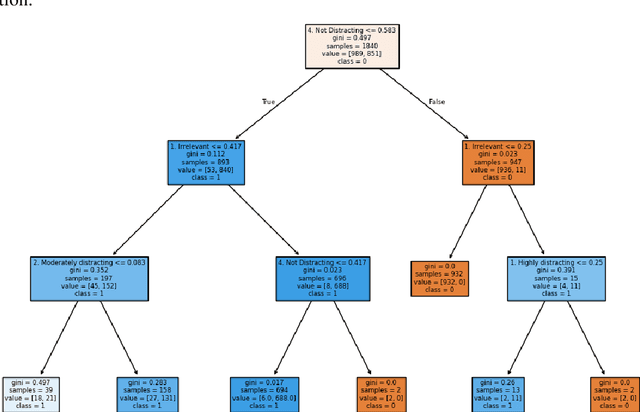
Explainable AI Insights for Symbolic Computation: A case study on selecting the variable ordering for cylindrical algebraic decomposition
Apr 24, 2023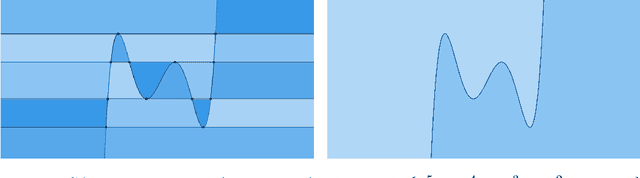
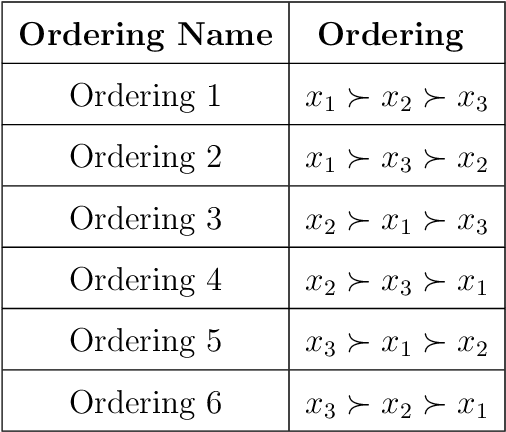
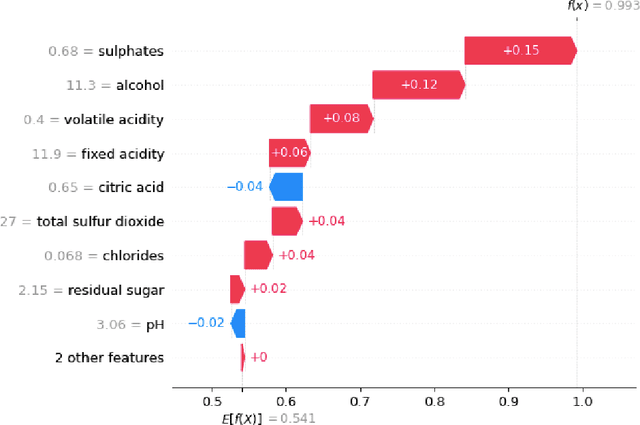
In recent years there has been increased use of machine learning (ML) techniques within mathematics, including symbolic computation where it may be applied safely to optimise or select algorithms. This paper explores whether using explainable AI (XAI) techniques on such ML models can offer new insight for symbolic computation, inspiring new implementations within computer algebra systems that do not directly call upon AI tools. We present a case study on the use of ML to select the variable ordering for cylindrical algebraic decomposition. It has already been demonstrated that ML can make the choice well, but here we show how the SHAP tool for explainability can be used to inform new heuristics of a size and complexity similar to those human-designed heuristics currently commonly used in symbolic computation.
Comparison Between Genetic Fuzzy Methodology and Q-learning for Collaborative Control Design
Aug 28, 2020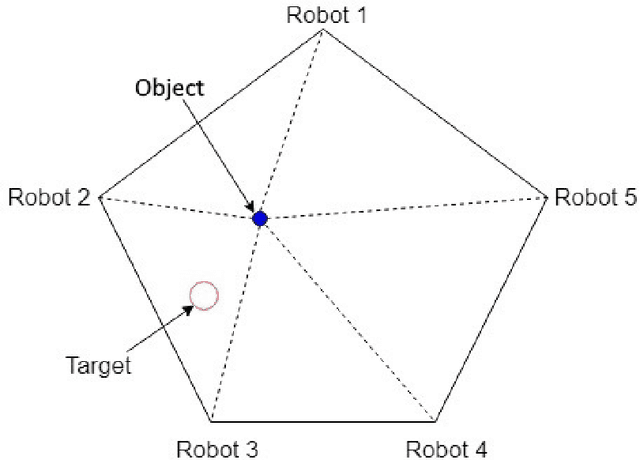
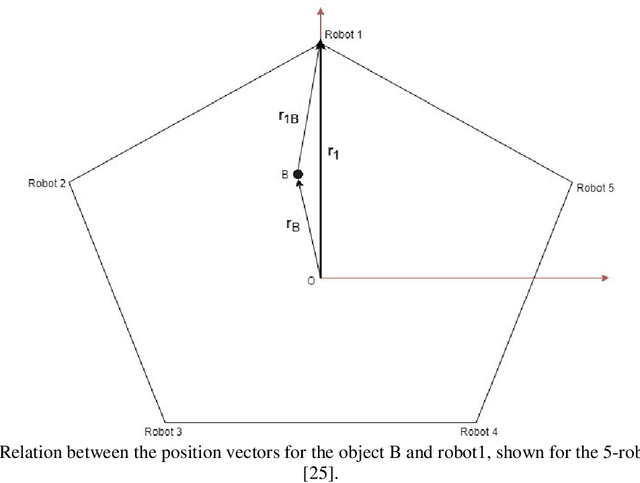

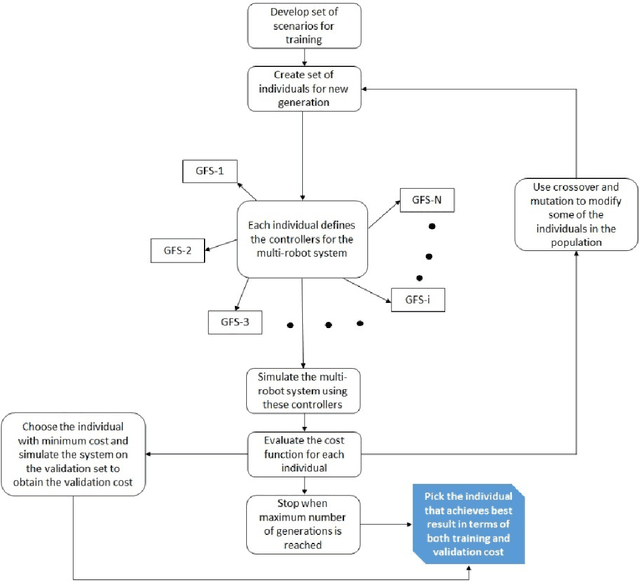
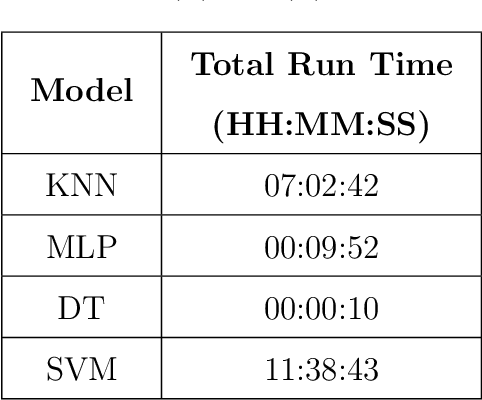
A comparison between two machine learning approaches viz., Genetic Fuzzy Methodology and Q-learning, is presented in this paper. The approaches are used to model controllers for a set of collaborative robots that need to work together to bring an object to a target position. The robots are fixed and are attached to the object through elastic cables. A major constraint considered in this problem is that the robots cannot communicate with each other. This means that at any instant, each robot has no motion or control information of the other robots and it can only pull or release its cable based only on the motion states of the object. This decentralized control problem provides a good example to test the capabilities and restrictions of these two machine learning approaches. The system is first trained using a set of training scenarios and then applied to an extensive test set to check the generalization achieved by each method.
* 15 pages, 9 figures