 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInformation Requirements of Collision-Based Micromanipulation
Jul 17, 2020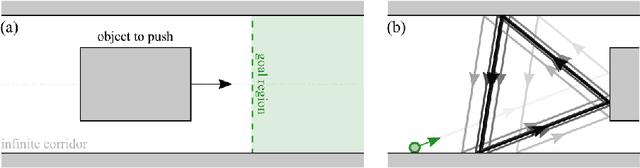
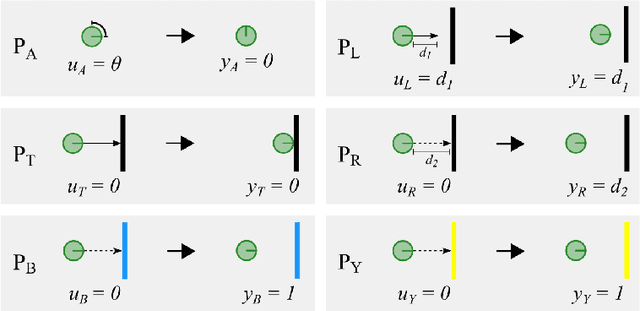
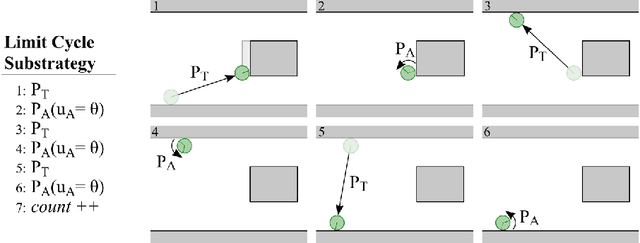
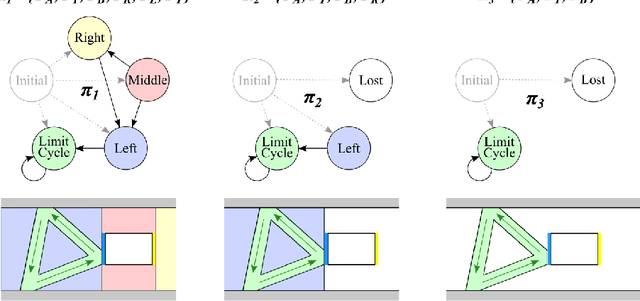
We present a task-centered formal analysis of the relative power of several robot designs, inspired by the unique properties and constraints of micro-scale robotic systems. Our task of interest is object manipulation because it is a fundamental prerequisite for more complex applications such as micro-scale assembly or cell manipulation. Motivated by the difficulty in observing and controlling agents at the micro-scale, we focus on the design of boundary interactions: the robot's motion strategy when it collides with objects or the environment boundary, otherwise known as a bounce rule. We present minimal conditions on the sensing, memory, and actuation requirements of periodic ``bouncing'' robot trajectories that move an object in a desired direction through the incidental forces arising from robot-object collisions. Using an information space framework and a hierarchical controller, we compare several robot designs, emphasizing the information requirements of goal completion under different initial conditions, as well as what is required to recognize irreparable task failure. Finally, we present a physically-motivated model of boundary interactions, and analyze the robustness and dynamical properties of resulting trajectories.
Virtual Reality for Robots
Sep 16, 2019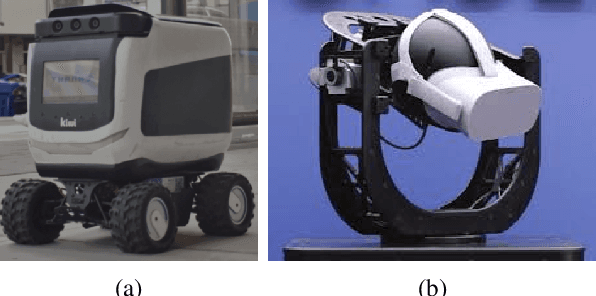
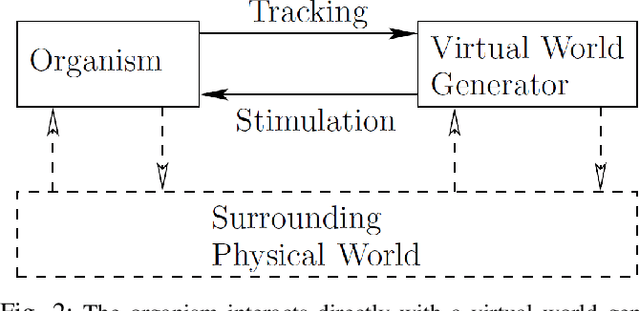
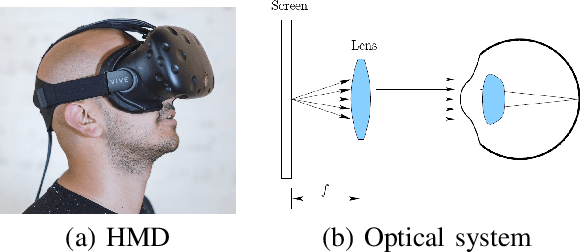
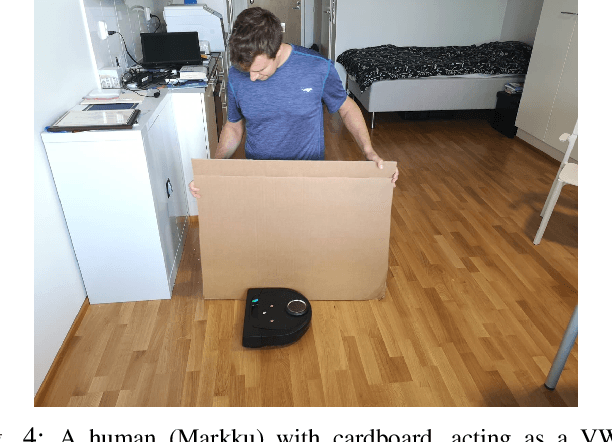
This paper applies the principles of Virtual Reality (VR) to robots, rather than living organisms. A simulator, of either physical states or information states, renders outputs to custom displays that fool the robot's sensors. This enables the design of targeted experiences for the robot that are more realistic than pure simulation, yet more feasible and controllable than real-world experiences. Potential applications include testing procedures that are better than simulation, reverse engineering of unknown robots, the study of spoofing attacks and anti-spoofing techniques, and sample generation for machine learning. A general mathematical framework is presented, along with a simple experiment, detailed examples, and discussion of the implications.
Robot Design: Formalisms, Representations, and the Role of the Designer
Jun 13, 2018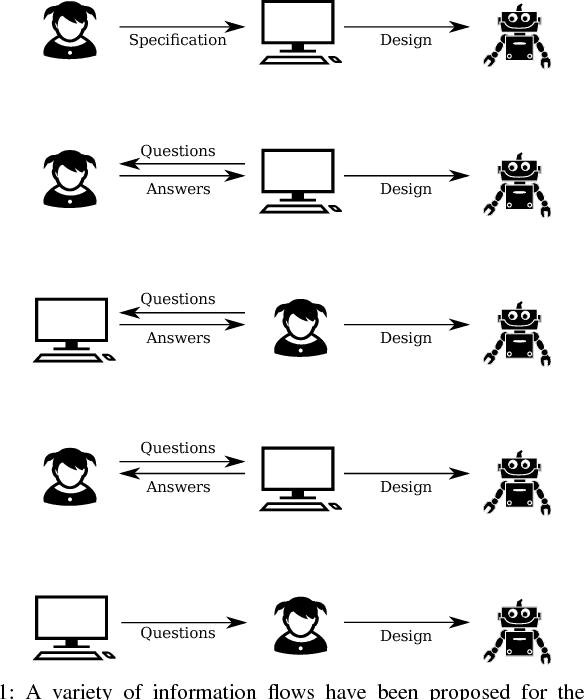
The objective of this paper is to distill the following essential idea from the RSS 2016 Workshop on Minimality and Design Automation and the RSS 2017 Workshop on Minimality and Trade-offs in Automated Robot Design: The information abstractions popular within robotics, designed as they were to address insulated sub-problems, are currently inadequate for design automation. This paper's first aim is to draw together multiple threads---specifically those of formalization, minimality, automation, and integration---and to argue that robot design questions involve some of the most interesting and fundamental challenges for the discipline. While most efforts in automating robot design have focused on optimization of hardware, robot design is also inextricably linked to the design of the internal state of the robot, how that internal state interacts with sensors and actuators, and how task specifications are designed within this context. Focusing attention on those considerations is worthwhile for the study of robot design because they are currently in a critical intellectual sweet spot, being out of reach technically, but only just. The second ingredient of this paper forms a roadmap. It emphasizes two aspects: (1) the role of models in robot design, a reprise of the old chestnut about representation in robotics (namely, that "the world is its own best model"); (2) a consideration of the human-element within the envisioned scheme.