 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot Design: Formalisms, Representations, and the Role of the Designer
Paper and Code
Jun 13, 2018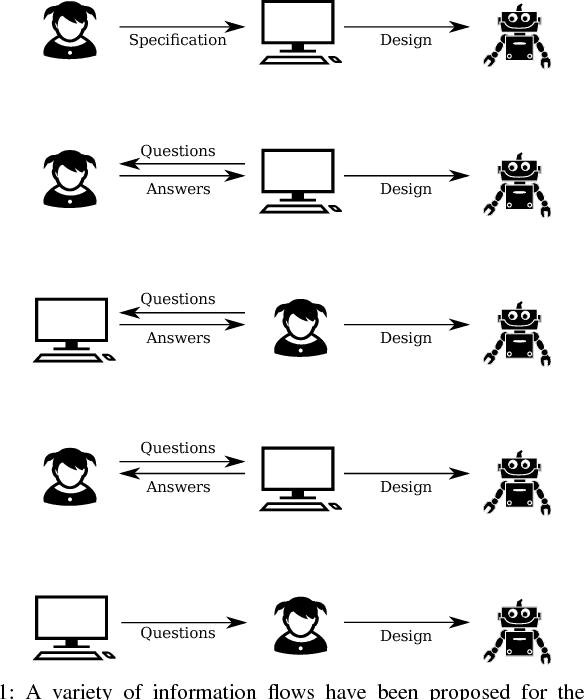
The objective of this paper is to distill the following essential idea from the RSS 2016 Workshop on Minimality and Design Automation and the RSS 2017 Workshop on Minimality and Trade-offs in Automated Robot Design: The information abstractions popular within robotics, designed as they were to address insulated sub-problems, are currently inadequate for design automation. This paper's first aim is to draw together multiple threads---specifically those of formalization, minimality, automation, and integration---and to argue that robot design questions involve some of the most interesting and fundamental challenges for the discipline. While most efforts in automating robot design have focused on optimization of hardware, robot design is also inextricably linked to the design of the internal state of the robot, how that internal state interacts with sensors and actuators, and how task specifications are designed within this context. Focusing attention on those considerations is worthwhile for the study of robot design because they are currently in a critical intellectual sweet spot, being out of reach technically, but only just. The second ingredient of this paper forms a roadmap. It emphasizes two aspects: (1) the role of models in robot design, a reprise of the old chestnut about representation in robotics (namely, that "the world is its own best model"); (2) a consideration of the human-element within the envisioned scheme.