 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA 3D Printing Hexacopter: Design and Demonstration
Mar 02, 2021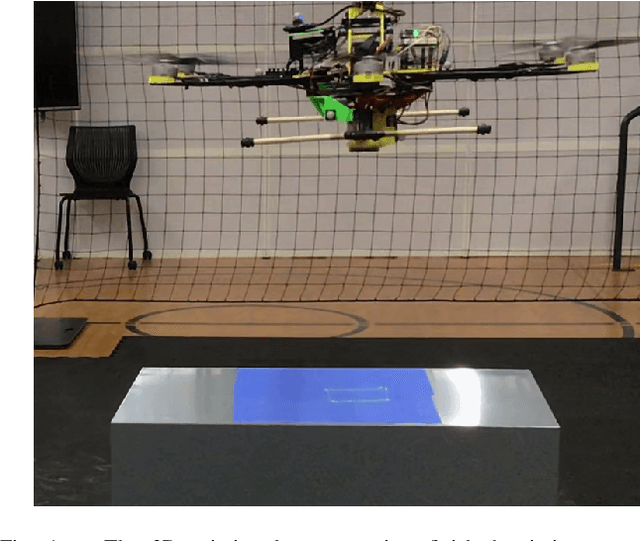
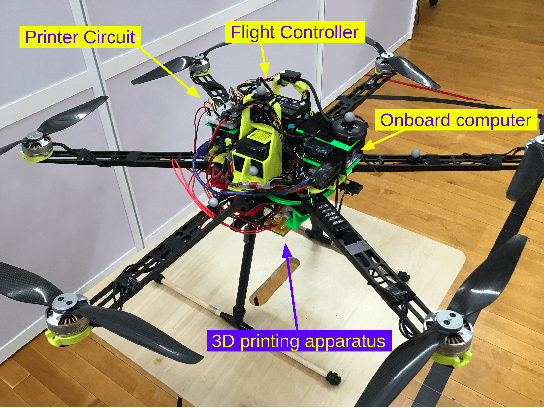

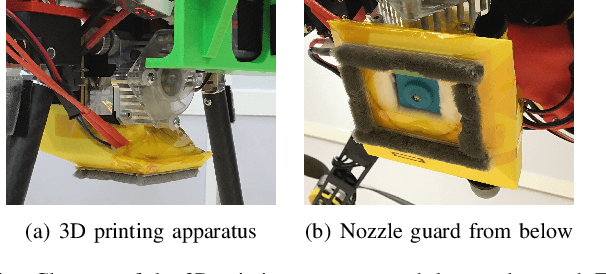
3D printing using robots has garnered significant interest in manufacturing and construction in recent years. A robot's versatility paired with the design freedom of 3D printing offers promising opportunities for how parts and structures are built in the future. However, 3D printed objects are still limited in size and location due to a lack of vertical mobility of ground robots. These limitations severely restrict the potential of the 3D printing process. To overcome these limitations, we develop a hexacopter testbed that can print via fused deposition modeling during flight. We discuss the design of this testbed and develop a simple control strategy for initial print tests. By successfully performing these initial print tests, we demonstrate the feasibility of this approach and lay the groundwork for printing 3D parts and structures with drones.
Towards online monitoring and data-driven control: a study of segmentation algorithms for infrared images of the powder bed
Nov 18, 2020



An increasing number of selective laser sintering and selective laser melting machines use off-axis infrared cameras to improve online monitoring and data-driven control capabilities. However, there is still a severe lack of algorithmic solutions to properly process the infrared images from these cameras that has led to several key limitations: a lack of online monitoring capabilities for the laser tracks, insufficient pre-processing of the infrared images for data-driven methods, and large memory requirements for storing the infrared images. To address these limitations, we study over 30 segmentation algorithms that segment each infrared image into a foreground and background. By evaluating each algorithm based on its segmentation accuracy, computational speed, and robustness against spatter detection, we identify promising algorithmic solutions. The identified algorithms can be readily applied to the selective laser sintering and selective laser melting machines to address each of the above limitations and thus, significantly improve process control.
An Encoder-Decoder Based Approach for Anomaly Detection with Application in Additive Manufacturing
Jul 26, 2019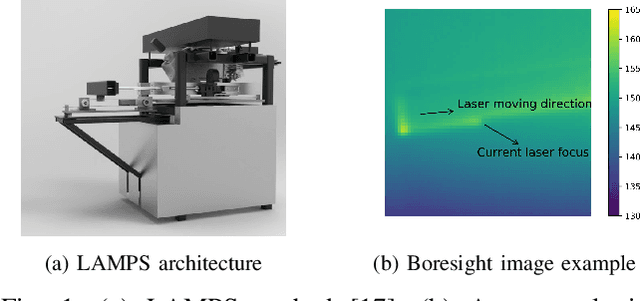
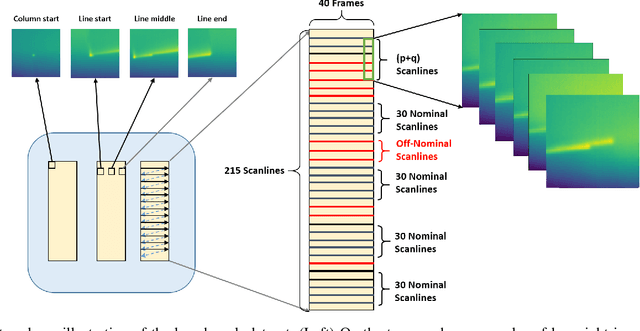
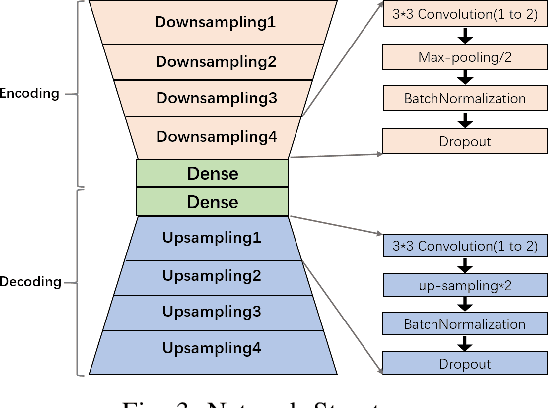
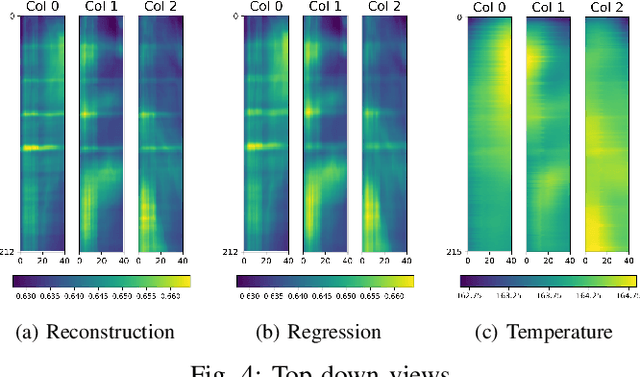
We present a novel unsupervised deep learning approach that utilizes the encoder-decoder architecture for detecting anomalies in sequential sensor data collected during industrial manufacturing. Our approach is designed not only to detect whether there exists an anomaly at a given time step, but also to predict what will happen next in the (sequential) process. We demonstrate our approach on a dataset collected from a real-world testbed. The dataset contains images collected under both normal conditions and synthetic anomalies. We show that the encoder-decoder model is able to identify the injected anomalies in a modern manufacturing process in an unsupervised fashion. In addition, it also gives hints about the temperature non-uniformity of the testbed during manufacturing, which is what we are not aware of before doing the experiment.