 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA 3D Printing Hexacopter: Design and Demonstration
Paper and Code
Mar 02, 2021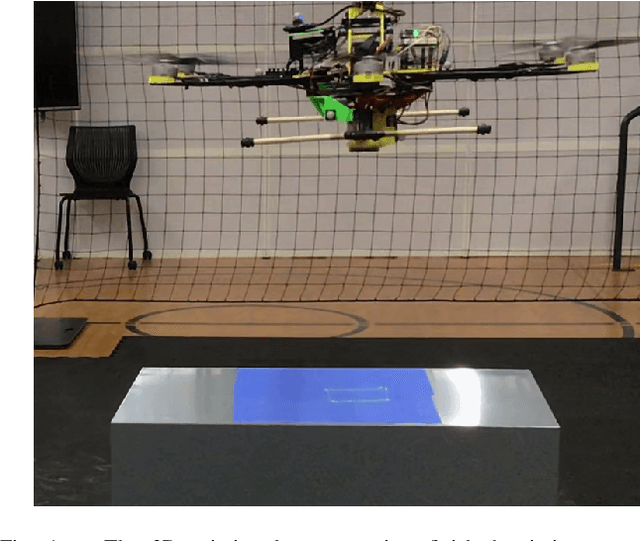
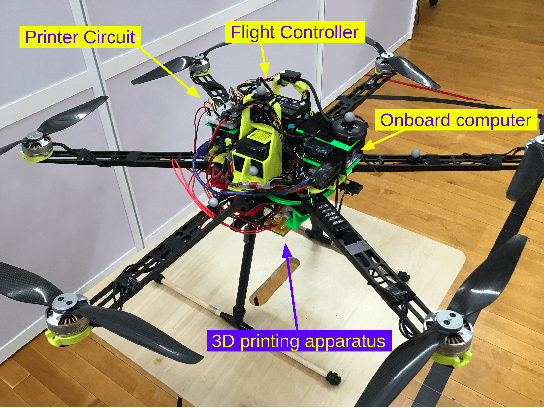

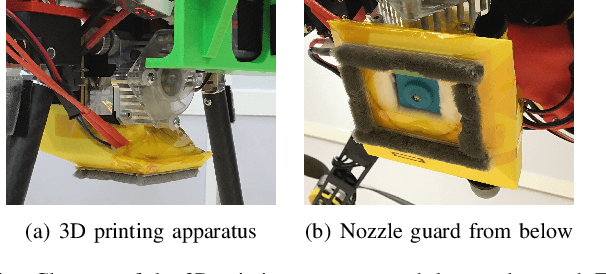
3D printing using robots has garnered significant interest in manufacturing and construction in recent years. A robot's versatility paired with the design freedom of 3D printing offers promising opportunities for how parts and structures are built in the future. However, 3D printed objects are still limited in size and location due to a lack of vertical mobility of ground robots. These limitations severely restrict the potential of the 3D printing process. To overcome these limitations, we develop a hexacopter testbed that can print via fused deposition modeling during flight. We discuss the design of this testbed and develop a simple control strategy for initial print tests. By successfully performing these initial print tests, we demonstrate the feasibility of this approach and lay the groundwork for printing 3D parts and structures with drones.