 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Intrinsic Vector Heat Network
Jun 14, 2024Vector fields are widely used to represent and model flows for many science and engineering applications. This paper introduces a novel neural network architecture for learning tangent vector fields that are intrinsically defined on manifold surfaces embedded in 3D. Previous approaches to learning vector fields on surfaces treat vectors as multi-dimensional scalar fields, using traditional scalar-valued architectures to process channels individually, thus fail to preserve fundamental intrinsic properties of the vector field. The core idea of this work is to introduce a trainable vector heat diffusion module to spatially propagate vector-valued feature data across the surface, which we incorporate into our proposed architecture that consists of vector-valued neurons. Our architecture is invariant to rigid motion of the input, isometric deformation, and choice of local tangent bases, and is robust to discretizations of the surface. We evaluate our Vector Heat Network on triangle meshes, and empirically validate its invariant properties. We also demonstrate the effectiveness of our method on the useful industrial application of quadrilateral mesh generation.
Dynamic Mesh-Aware Radiance Fields
Sep 08, 2023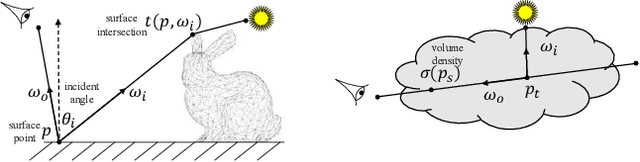



Embedding polygonal mesh assets within photorealistic Neural Radience Fields (NeRF) volumes, such that they can be rendered and their dynamics simulated in a physically consistent manner with the NeRF, is under-explored from the system perspective of integrating NeRF into the traditional graphics pipeline. This paper designs a two-way coupling between mesh and NeRF during rendering and simulation. We first review the light transport equations for both mesh and NeRF, then distill them into an efficient algorithm for updating radiance and throughput along a cast ray with an arbitrary number of bounces. To resolve the discrepancy between the linear color space that the path tracer assumes and the sRGB color space that standard NeRF uses, we train NeRF with High Dynamic Range (HDR) images. We also present a strategy to estimate light sources and cast shadows on the NeRF. Finally, we consider how the hybrid surface-volumetric formulation can be efficiently integrated with a high-performance physics simulator that supports cloth, rigid and soft bodies. The full rendering and simulation system can be run on a GPU at interactive rates. We show that a hybrid system approach outperforms alternatives in visual realism for mesh insertion, because it allows realistic light transport from volumetric NeRF media onto surfaces, which affects the appearance of reflective/refractive surfaces and illumination of diffuse surfaces informed by the dynamic scene.
Simultaneous Navigation and Construction Benchmarking Environments
Mar 31, 2021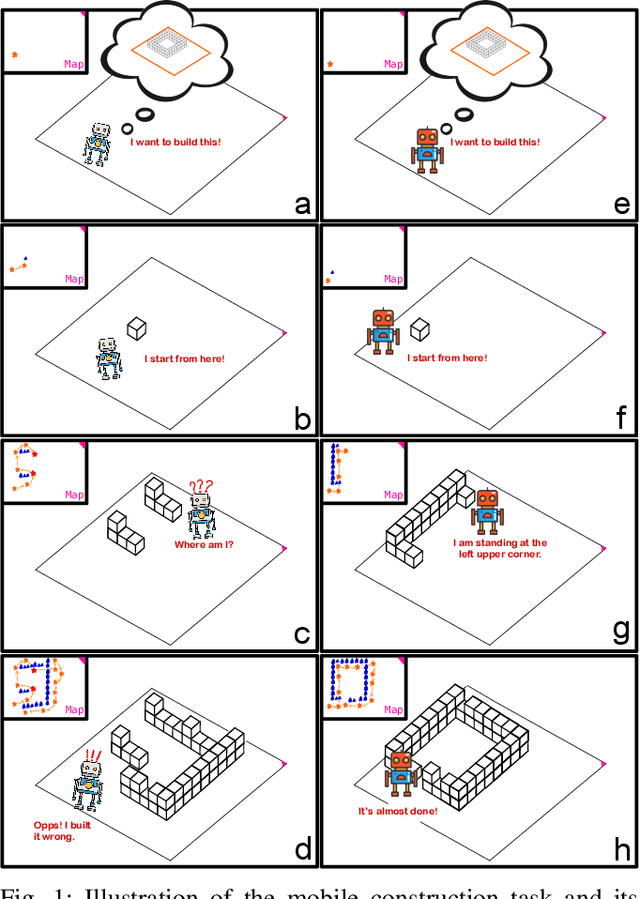
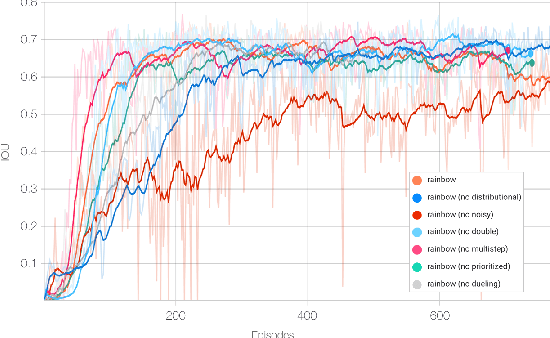
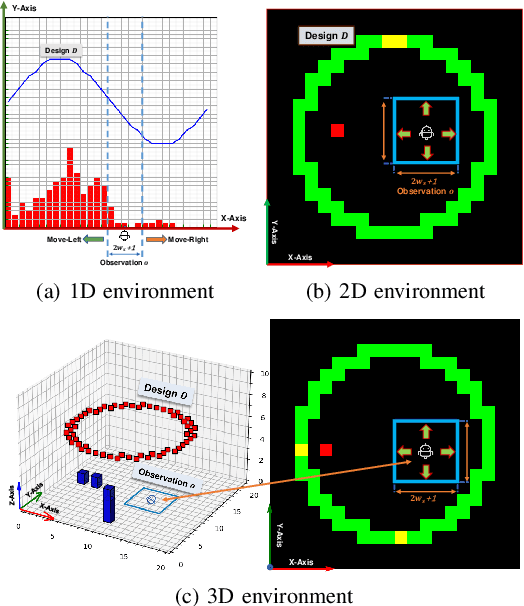
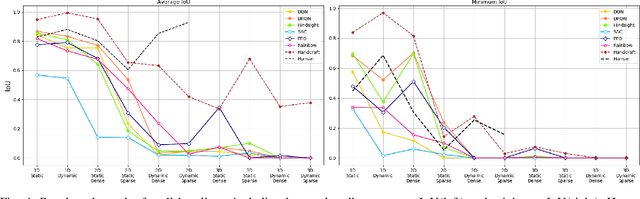
We need intelligent robots for mobile construction, the process of navigating in an environment and modifying its structure according to a geometric design. In this task, a major robot vision and learning challenge is how to exactly achieve the design without GPS, due to the difficulty caused by the bi-directional coupling of accurate robot localization and navigation together with strategic environment manipulation. However, many existing robot vision and learning tasks such as visual navigation and robot manipulation address only one of these two coupled aspects. To stimulate the pursuit of a generic and adaptive solution, we reasonably simplify mobile construction as a partially observable Markov decision process (POMDP) in 1/2/3D grid worlds and benchmark the performance of a handcrafted policy with basic localization and planning, and state-of-the-art deep reinforcement learning (RL) methods. Our extensive experiments show that the coupling makes this problem very challenging for those methods, and emphasize the need for novel task-specific solutions.