 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRevisiting Policy Gradients for Restricted Policy Classes: Escaping Myopic Local Optima with $k$-step Policy Gradients
May 11, 2026This work revisits standard policy gradient methods used on restricted policy classes, which are known to get stuck in suboptimal critical points. We identify an important cause for this phenomenon to be that the policy gradient is itself fundamentally myopic, i.e. it only improves the policy based on the one-step $Q$-function. In this work, we propose a generalized $k$-step policy gradient method that couples the randomness within a $k$-step time window and can escape the myopic local optima in MDPs with restricted policy classes. We show this new method is theoretically guaranteed to converge to a solution that is exponentially close in performance to the optimal deterministic policy with respect to $k$. Further, we show projected gradient descent and mirror descent with this $k$-step policy gradient can achieve this exponential guarantee in $O(\frac{1}{T})$ iterations, despite only assuming smoothness and differentiability of the value function. This will provide near optimal solutions to previously elusive applications like state aggregation and partially observable cooperative multi-agent settings. Moreover, our bounds avoid the ubiquitous distribution mismatch factors $||d_μ^{π^*} / d_μ^π||_\infty$ and $||d_μ^{π^*} / μ||_\infty$ enabling the $k$-step policy gradient method to escape suboptimal critical points that emerge from poor exploration in fully observable settings.
Thinking Beyond Visibility: A Near-Optimal Policy Framework for Locally Interdependent Multi-Agent MDPs
Jun 04, 2025Decentralized Partially Observable Markov Decision Processes (Dec-POMDPs) are known to be NEXP-Complete and intractable to solve. However, for problems such as cooperative navigation, obstacle avoidance, and formation control, basic assumptions can be made about local visibility and local dependencies. The work DeWeese and Qu 2024 formalized these assumptions in the construction of the Locally Interdependent Multi-Agent MDP. In this setting, it establishes three closed-form policies that are tractable to compute in various situations and are exponentially close to optimal with respect to visibility. However, it is also shown that these solutions can have poor performance when the visibility is small and fixed, often getting stuck during simulations due to the so called "Penalty Jittering" phenomenon. In this work, we establish the Extended Cutoff Policy Class which is, to the best of our knowledge, the first non-trivial class of near optimal closed-form partially observable policies that are exponentially close to optimal with respect to the visibility for any Locally Interdependent Multi-Agent MDP. These policies are able to remember agents beyond their visibilities which allows them to perform significantly better in many small and fixed visibility settings, resolve Penalty Jittering occurrences, and under certain circumstances guarantee fully observable joint optimal behavior despite the partial observability. We also propose a generalized form of the Locally Interdependent Multi-Agent MDP that allows for transition dependence and extended reward dependence, then replicate our theoretical results in this setting.
Locally Interdependent Multi-Agent MDP: Theoretical Framework for Decentralized Agents with Dynamic Dependencies
Jun 10, 2024
Many multi-agent systems in practice are decentralized and have dynamically varying dependencies. There has been a lack of attempts in the literature to analyze these systems theoretically. In this paper, we propose and theoretically analyze a decentralized model with dynamically varying dependencies called the Locally Interdependent Multi-Agent MDP. This model can represent problems in many disparate domains such as cooperative navigation, obstacle avoidance, and formation control. Despite the intractability that general partially observable multi-agent systems suffer from, we propose three closed-form policies that are theoretically near-optimal in this setting and can be scalable to compute and store. Consequentially, we reveal a fundamental property of Locally Interdependent Multi-Agent MDP's that the partially observable decentralized solution is exponentially close to the fully observable solution with respect to the visibility radius. We then discuss extensions of our closed-form policies to further improve tractability. We conclude by providing simulations to investigate some long horizon behaviors of our closed-form policies.
BEAR: Sketching BFGS Algorithm for Ultra-High Dimensional Feature Selection in Sublinear Memory
Oct 26, 2020
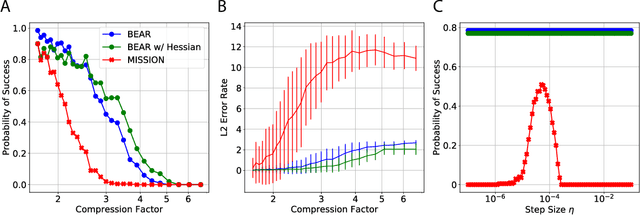

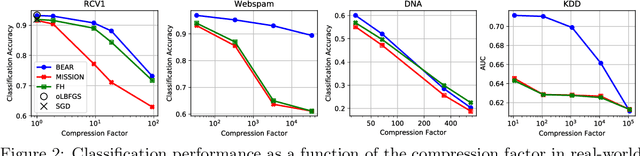
We consider feature selection for applications in machine learning where the dimensionality of the data is so large that it exceeds the working memory of the (local) computing machine. Unfortunately, current large-scale sketching algorithms show poor memory-accuracy trade-off due to the irreversible collision and accumulation of the stochastic gradient noise in the sketched domain. Here, we develop a second-order ultra-high dimensional feature selection algorithm, called BEAR, which avoids the extra collisions by storing the second-order gradients in the celebrated Broyden-Fletcher-Goldfarb-Shannon (BFGS) algorithm in Count Sketch, a sublinear memory data structure from the streaming literature. Experiments on real-world data sets demonstrate that BEAR requires up to three orders of magnitude less memory space to achieve the same classification accuracy compared to the first-order sketching algorithms. Theoretical analysis proves convergence of BEAR with rate O(1/t) in t iterations of the sketched algorithm. Our algorithm reveals an unexplored advantage of second-order optimization for memory-constrained sketching of models trained on ultra-high dimensional data sets.