 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensing-Based Beamformed Resource Allocation in Standalone Millimeter-Wave Vehicular Networks
Mar 19, 2025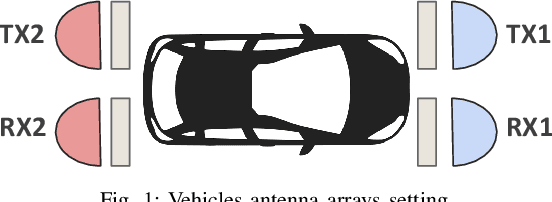
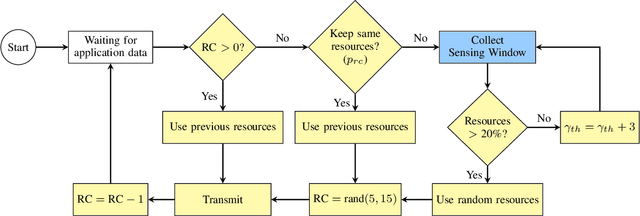
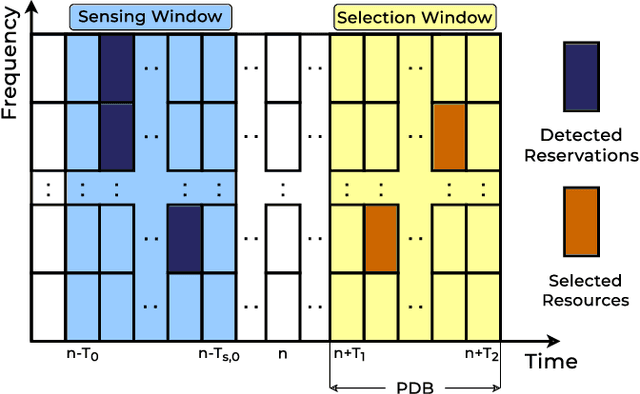
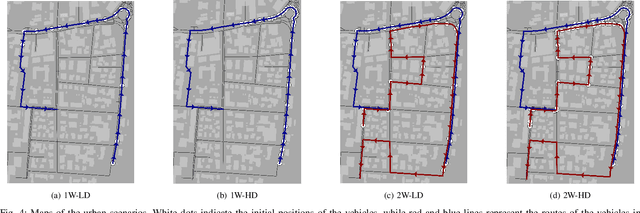
In 3GPP New Radio (NR) Vehicle-to-Everything (V2X), the new standard for next-generation vehicular networks, vehicles can autonomously select sidelink resources for data transmission, which permits network operations without cellular coverage. However, standalone resource allocation is uncoordinated, and is complicated by the high mobility of the nodes that may introduce unforeseen channel collisions (e.g., when a transmitting vehicle changes path) or free up resources (e.g., when a vehicle moves outside of the communication area). Moreover, unscheduled resource allocation is prone to the hidden node and exposed node problems, which are particularly critical considering directional transmissions. In this paper, we implement and demonstrate a new channel access scheme for NR V2X in Frequency Range 2 (FR2), i.e., at millimeter wave (mmWave) frequencies, based on directional and beamformed transmissions along with Sidelink Control Information (SCI) to select resources for transmission. We prove via simulation that this approach can reduce the probability of collision for resource allocation, compared to a baseline solution that does not configure SCI transmissions.
Enhanced Time Division Duplexing Slot Allocation and Scheduling in Non-Terrestrial Networks
Dec 02, 2024

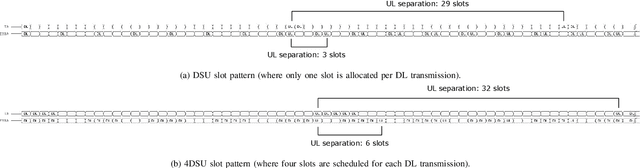
The integration of non-terrestrial networks (NTNs) and terrestrial networks (TNs) is fundamental for extending connectivity to rural and underserved areas that lack coverage from traditional cellular infrastructure. However, this integration presents several challenges. For instance, TNs mainly operate in Time Division Duplexing (TDD). However, for NTN via satellites, TDD is complicated due to synchronization problems in large cells, and the significant impact of guard periods and long propagation delays. In this paper, we propose a novel slot allocation mechanism to enable TDD in NTN. This approach permits to allocate additional transmissions during the guard period between a downlink slot and the corresponding uplink slot to reduce the overhead, provided that they do not interfere with other concurrent transmissions. Moreover, we propose two scheduling methods to select the users that transmit based on considerations related to the Signal-to-Noise Ratio (SNR) or the propagation delay. Simulations demonstrate that our proposal can increase the network capacity compared to a benchmark scheme that does not schedule transmissions in guard periods.
On the Energy Consumption of UAV Edge Computing in Non-Terrestrial Networks
Dec 20, 2023



During the last few years, the use of Unmanned Aerial Vehicles (UAVs) equipped with sensors and cameras has emerged as a cutting-edge technology to provide services such as surveillance, infrastructure inspections, and target acquisition. However, this approach requires UAVs to process data onboard, mainly for person/object detection and recognition, which may pose significant energy constraints as UAVs are battery-powered. A possible solution can be the support of Non-Terrestrial Networks (NTNs) for edge computing. In particular, UAVs can partially offload data (e.g., video acquisitions from onboard sensors) to more powerful upstream High Altitude Platforms (HAPs) or satellites acting as edge computing servers to increase the battery autonomy compared to local processing, even though at the expense of some data transmission delays. Accordingly, in this study we model the energy consumption of UAVs, HAPs, and satellites considering the energy for data processing, offloading, and hovering. Then, we investigate whether data offloading can improve the system performance. Simulations demonstrate that edge computing can improve both UAV autonomy and end-to-end delay compared to onboard processing in many configurations.
Real-Time HAP-Assisted Vehicular Edge Computing for Rural Areas
Jan 24, 2023

Non-Terrestrial Networks (NTNs) are expected to be a key component of 6th generation (6G) networks to support broadband seamless Internet connectivity and expand the coverage even in rural and remote areas. In this context, High Altitude Platforms (HAPs) can act as edge servers to process computational tasks offloaded by energy-constrained terrestrial devices such as Internet of Things (IoT) sensors and ground vehicles (GVs). In this paper, we analyze the opportunity to support Vehicular Edge Computing (VEC) via HAP in a rural scenario where GVs can decide whether to process data onboard or offload them to a HAP. We characterize the system as a set of queues in which computational tasks arrive according to a Poisson arrival process. Then, we assess the optimal VEC offloading factor to maximize the probability of real-time service, given latency and computational capacity constraints.
An Open Framework to Model Diffraction by Dynamic Blockers in Millimeter Wave Simulations
Jun 10, 2022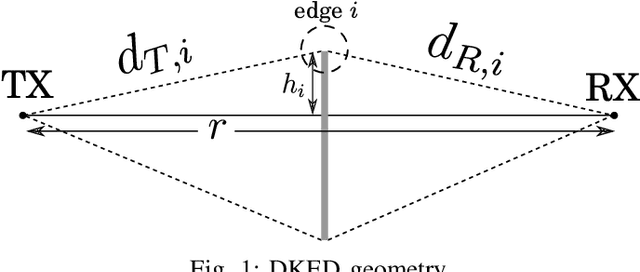
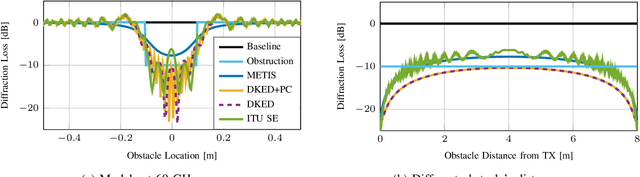


The millimeter wave (mmWave) band will be exploited to address the growing demand for high data rates and low latency. The higher frequencies, however, are prone to limitations on the propagation of the signal in the environment. Thus, highly directional beamforming is needed to increase the antenna gain. Another crucial problem of the mmWave frequencies is their vulnerability to blockage by physical obstacles. To this aim, we studied the problem of modeling the impact of second-order effects on mmWave channels, specifically the susceptibility of the mmWave signals to physical blockers. With respect to existing works on this topic, our project focuses on scenarios where mmWaves interact with multiple, dynamic blockers. Our open source software includes diffraction-based blockage models and interfaces directly with an open source Radio Frequency (RF) ray-tracing software.
UAV/HAP-Assisted Vehicular Edge Computing in 6G: Where and What to Offload?
Feb 22, 2022



In the context of 6th generation (6G) networks, vehicular edge computing (VEC) is emerging as a promising solution to let battery-powered ground vehicles with limited computing and storage resources offload processing tasks to more powerful devices. Given the dynamic vehicular environment, VEC systems need to be as flexible, intelligent, and adaptive as possible. To this aim, in this paper we study the opportunity to realize VEC via non-terrestrial networks (NTNs), where ground vehicles offload resource-hungry tasks to Unmanned Aerial Vehicles (UAVs), High Altitude Platforms (HAPs), or a combination of the two. We define an optimization problem in which tasks are modeled as a Poisson arrival process, and apply queuing theory to find the optimal offloading factor in the system. Numerical results show that aerial-assisted VEC is feasible even in dense networks, provided that high-capacity HAP/UAV platforms are available.