 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensing-Based Beamformed Resource Allocation in Standalone Millimeter-Wave Vehicular Networks
Mar 19, 2025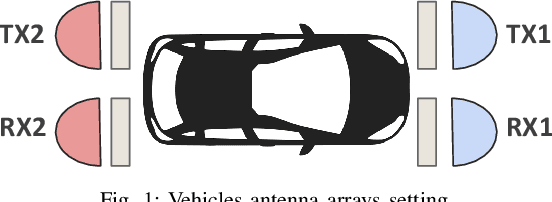
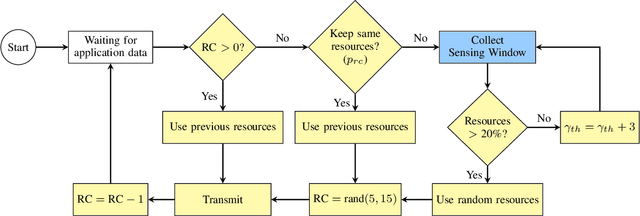
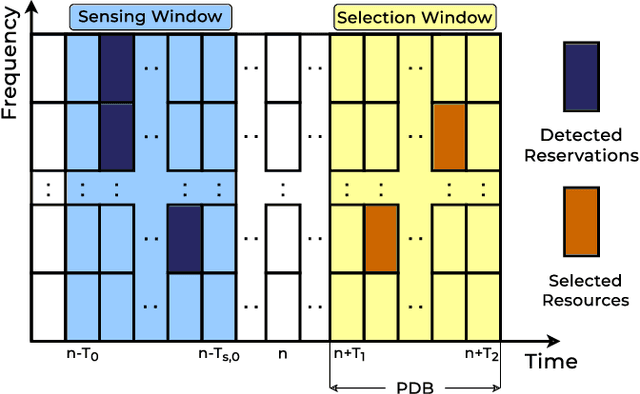
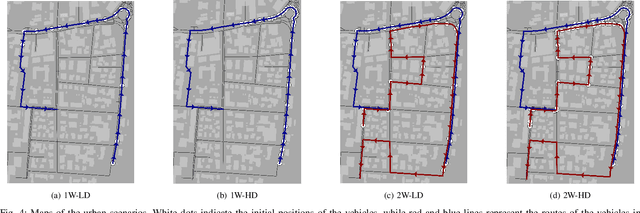
In 3GPP New Radio (NR) Vehicle-to-Everything (V2X), the new standard for next-generation vehicular networks, vehicles can autonomously select sidelink resources for data transmission, which permits network operations without cellular coverage. However, standalone resource allocation is uncoordinated, and is complicated by the high mobility of the nodes that may introduce unforeseen channel collisions (e.g., when a transmitting vehicle changes path) or free up resources (e.g., when a vehicle moves outside of the communication area). Moreover, unscheduled resource allocation is prone to the hidden node and exposed node problems, which are particularly critical considering directional transmissions. In this paper, we implement and demonstrate a new channel access scheme for NR V2X in Frequency Range 2 (FR2), i.e., at millimeter wave (mmWave) frequencies, based on directional and beamformed transmissions along with Sidelink Control Information (SCI) to select resources for transmission. We prove via simulation that this approach can reduce the probability of collision for resource allocation, compared to a baseline solution that does not configure SCI transmissions.
A Hybrid Model/Data-Driven Solution to Channel, Position and Orientation Tracking in mmWave Vehicular Systems
Mar 07, 2025Channel tracking in millimeter wave (mmWave) vehicular systems is crucial for maintaining robust vehicle-to-infrastructure (V2I) communication links, which can be leveraged to achieve high accuracy vehicle position and orientation tracking as a byproduct of communication. While prior work tends to simplify the system model by omitting critical system factors such as clock offsets, filtering effects, antenna array orientation offsets, and channel estimation errors, we address the challenges of a practical mmWave multiple-input multiple-output (MIMO) communication system between a single base station (BS) and a vehicle while tracking the vehicle's position and orientation (PO) considering realistic driving behaviors. We first develop a channel tracking algorithm based on multidimensional orthogonal matching pursuit (MOMP) with factoring (F-MOMP) to reduce computational complexity and enable high-resolution channel estimates during the tracking stage, suitable for PO estimation. Then, we develop a network called VO-ChAT (Vehicle Orientation-Channel Attention for orientation Tracking), which processes the channel estimate sequence for orientation prediction. Afterward, a weighted least squares (WLS) problem that exploits the channel geometry is formulated to create an initial estimate of the vehicle's 2D position. A second network named VP-ChAT (Vehicle Position-Channel Attention for position Tracking) refines the geometric position estimate. VP-ChAT is a Transformer inspired network processing the historical channel and position estimates to provide the correction for the initial geometric position estimate. The proposed solution is evaluated using raytracing generated channels in an urban canyon environment. For 80% of the cases it achieves a 2D position tracking accuracy of 26 cm while orientation errors are kept below 0.5 degree.
Sparse Recovery with Attention: A Hybrid Data/Model Driven Solution for High Accuracy Position and Channel Tracking at mmWave
Aug 26, 2023In this paper, we propose first a mmWave channel tracking algorithm based on multidimensional orthogonal matching pursuit algorithm (MOMP) using reduced sparsifying dictionaries, which exploits information from channel estimates in previous frames. Then, we present an algorithm to obtain the vehicle's initial location for the current frame by solving a system of geometric equations that leverage the estimated path parameters. Next, we design an attention network that analyzes the series of channel estimates, the vehicle's trajectory, and the initial estimate of the position associated with the current frame, to generate a refined, high accuracy position estimate. The proposed system is evaluated through numerical experiments using realistic mmWave channel series generated by ray-tracing. The experimental results show that our system provides a 2D position tracking error below 20 cm, significantly outperforming previous work based on Bayesian filtering.