 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of an embedded hardware platform for cell-level diagnostics in commercial battery modules
Mar 31, 2026While battery aging is commonly studied at the cell-level, evaluating aging and performance within battery modules remains a critical challenge. Testing cells within fully assembled modules requires hardware solutions to access cell-level information without compromising module integrity. In this paper, we design and develop a hardware testing platform to monitor and control the internal cells of battery modules contained in the Audi e-tron battery pack. The testing is performed across all 36 modules of the pack. The platform integrates voltage sensors, balancing circuitry, and a micro-controller to enable safe, simultaneous cell screening without disassembling the modules. Using the proposed testing platform, cell voltage imbalances within each module are constrained to a defined reference value, and cell signals can be safely accessed, enabling accurate and non-invasive cell-level state-of-health assessments. On a broader scale, our solution allows for the quantification of internal heterogeneity within modules, providing valuable insights for both first- and second-life applications and supporting efficient battery pack maintenance and repurposing.
In-Context Learning for Zero-Shot Speed Estimation of BLDC motors
Apr 01, 2025Accurate speed estimation in sensorless brushless DC motors is essential for high-performance control and monitoring, yet conventional model-based approaches struggle with system nonlinearities and parameter uncertainties. In this work, we propose an in-context learning framework leveraging transformer-based models to perform zero-shot speed estimation using only electrical measurements. By training the filter offline on simulated motor trajectories, we enable real-time inference on unseen real motors without retraining, eliminating the need for explicit system identification while retaining adaptability to varying operating conditions. Experimental results demonstrate that our method outperforms traditional Kalman filter-based estimators, especially in low-speed regimes that are crucial during motor startup.
Three-Dimensional Coherent Diffractive Imaging of Isolated Faceted Nanostructures
Aug 08, 2022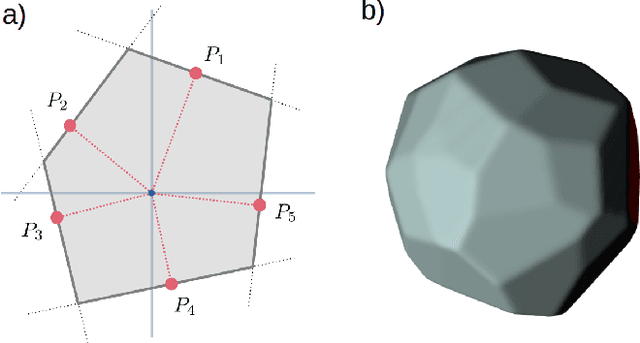
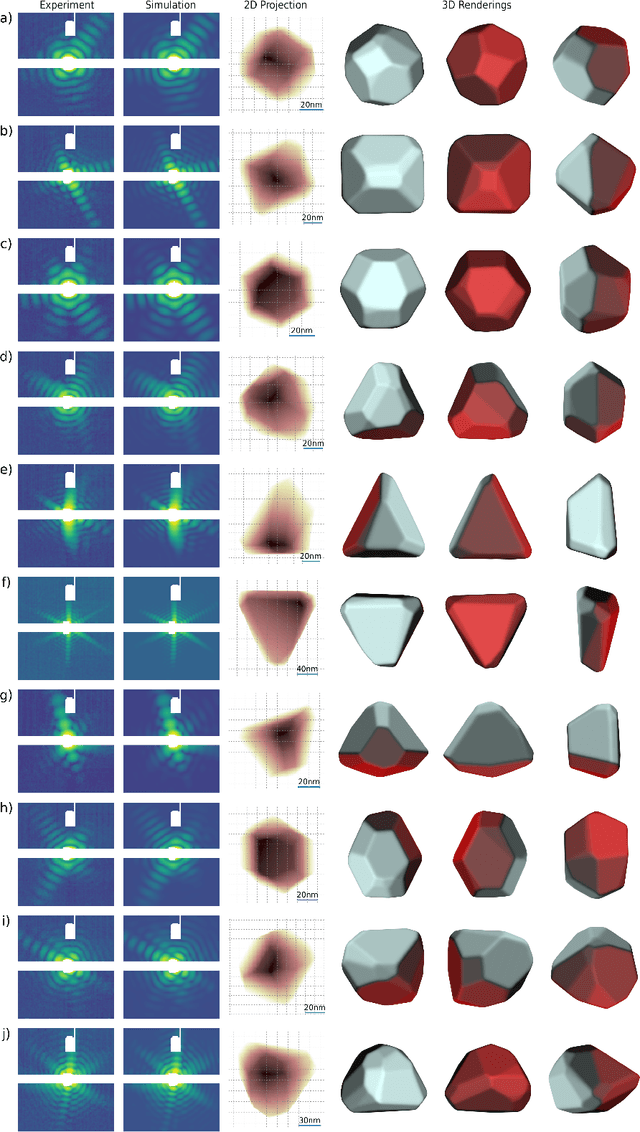
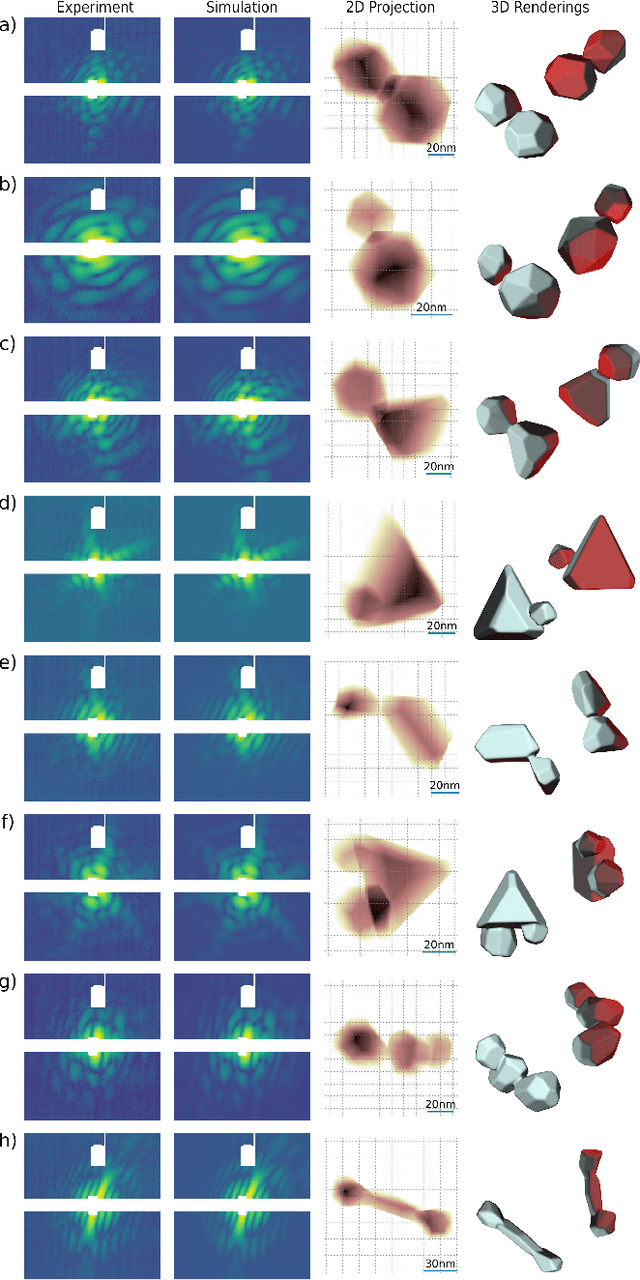
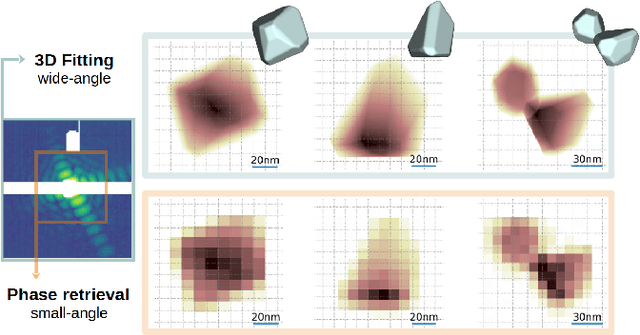
The structure and dynamics of isolated nanosamples in free flight can be directly visualized via single-shot coherent diffractive imaging using the intense and short pulses of X-ray free-electron lasers. Wide-angle scattering images even encode three-dimensional morphological information of the samples, but the retrieval of this information remains a challenge. Up to now, effective three-dimensional morphology reconstructions from single shots were only achieved via fitting with highly constrained models, requiring a priori knowledge about possible geometrical shapes. Here we present a much more generic imaging approach. Relying on a model that allows for any sample morphology described by a convex polyhedron, we reconstruct wide-angle diffraction patterns from individual silver nanoparticles. In addition to known structural motives with high symmetries, we retrieve imperfect shapes and agglomerates which were not accessible previously. Our results open new routes towards true 3D structure determination of single nanoparticles and, ultimately, 3D movies of ultrafast nanoscale dynamics.
Aggregated Channels Network for Real-Time Pedestrian Detection
Jan 01, 2018Convolutional neural networks (CNNs) have demonstrated their superiority in numerous computer vision tasks, yet their computational cost results prohibitive for many real-time applications such as pedestrian detection which is usually performed on low-consumption hardware. In order to alleviate this drawback, most strategies focus on using a two-stage cascade approach. Essentially, in the first stage a fast method generates a significant but reduced amount of high quality proposals that later, in the second stage, are evaluated by the CNN. In this work, we propose a novel detection pipeline that further benefits from the two-stage cascade strategy. More concretely, the enriched and subsequently compressed features used in the first stage are reused as the CNN input. As a consequence, a simpler network architecture, adapted for such small input sizes, allows to achieve real-time performance and obtain results close to the state-of-the-art while running significantly faster without the use of GPU. In particular, considering that the proposed pipeline runs in frame rate, the achieved performance is highly competitive. We furthermore demonstrate that the proposed pipeline on itself can serve as an effective proposal generator.