 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransformer-Based Wireless Capsule Endoscopy Bleeding Tissue Detection and Classification
Dec 26, 2024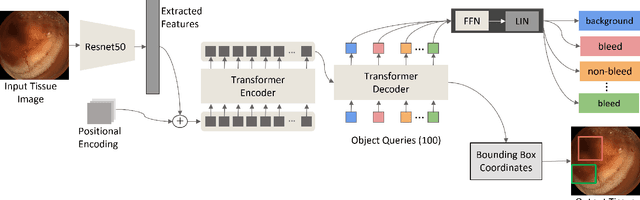

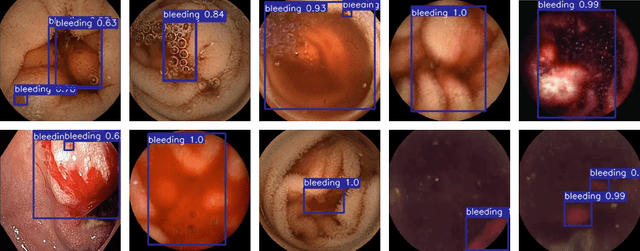
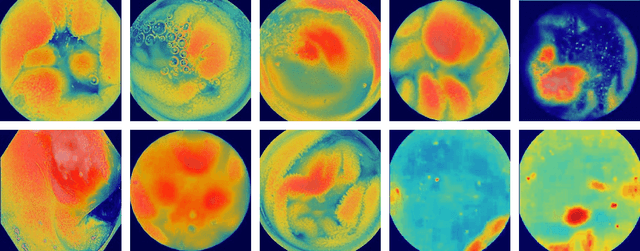
Informed by the success of the transformer model in various computer vision tasks, we design an end-to-end trainable model for the automatic detection and classification of bleeding and non-bleeding frames extracted from Wireless Capsule Endoscopy (WCE) videos. Based on the DETR model, our model uses the Resnet50 for feature extraction, the transformer encoder-decoder for bleeding and non-bleeding region detection, and a feedforward neural network for classification. Trained in an end-to-end approach on the Auto-WCEBleedGen Version 1 challenge training set, our model performs both detection and classification tasks as a single unit. Our model achieves an accuracy, recall, and F1-score classification percentage score of 98.28, 96.79, and 98.37 respectively, on the Auto-WCEBleedGen version 1 validation set. Further, we record an average precision (AP @ 0.5), mean-average precision (mAP) of 0.7447 and 0.7328 detection results. This earned us a 3rd place position in the challenge. Our code is publicly available via https://github.com/BasitAlawode/WCEBleedGen.
Robot Person Following in Uniform Crowd Environment
May 21, 2022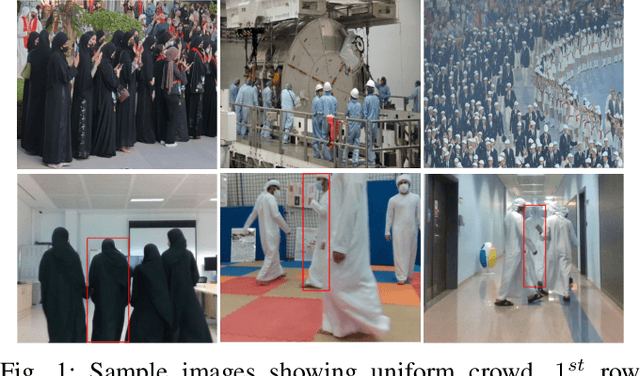
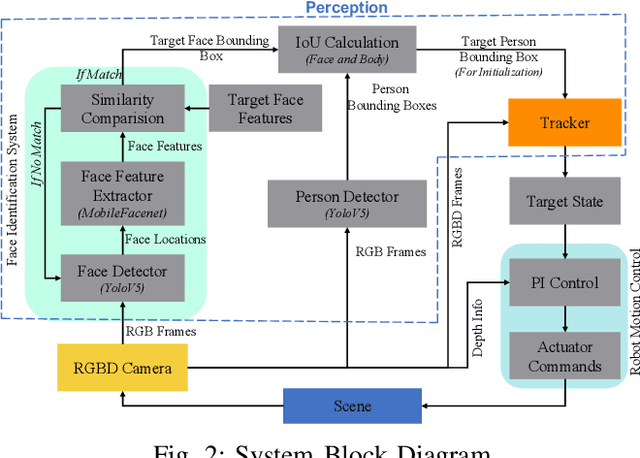
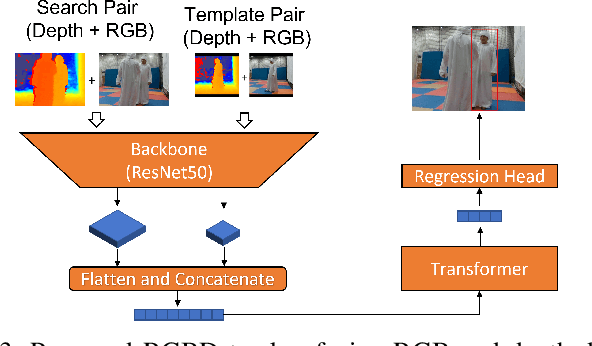
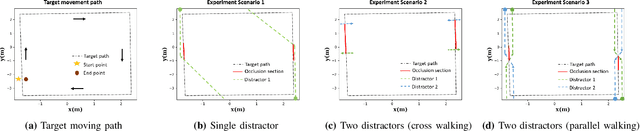
Person-tracking robots have many applications, such as in security, elderly care, and socializing robots. Such a task is particularly challenging when the person is moving in a Uniform crowd. Also, despite significant progress of trackers reported in the literature, state-of-the-art trackers have hardly addressed person following in such scenarios. In this work, we focus on improving the perceptivity of a robot for a person following task by developing a robust and real-time applicable object tracker. We present a new robot person tracking system with a new RGB-D tracker, Deep Tracking with RGB-D (DTRD) that is resilient to tricky challenges introduced by the uniform crowd environment. Our tracker utilizes transformer encoder-decoder architecture with RGB and depth information to discriminate the target person from similar distractors. A substantial amount of comprehensive experiments and results demonstrate that our tracker has higher performance in two quantitative evaluation metrics and confirms its superiority over other SOTA trackers.
Real-Time Face Recognition System
Apr 19, 2022
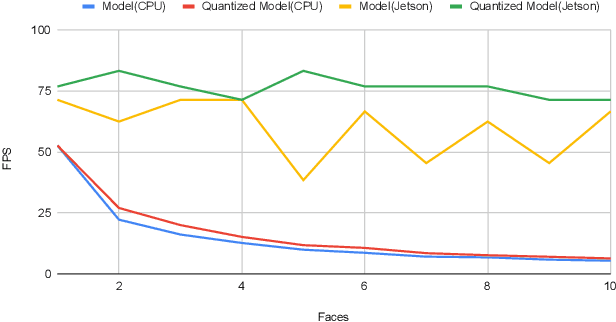

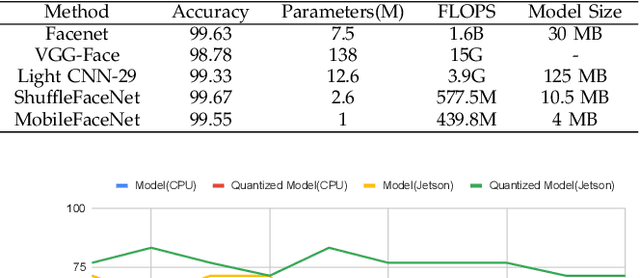
Over the past few decades, interest in algorithms for face recognition has been growing rapidly and has even surpassed human-level performance. Despite their accomplishments, their practical integration with a real-time performance-hungry system is not feasible due to high computational costs. So in this paper, we explore the recent, fast, and accurate face recognition system that can be easily integrated with real-time devices, and tested the algorithms on robot hardware platforms to confirm their robustness and speed.
* Poster
Underwater Image Enhancement Using Pre-trained Transformer
Apr 08, 2022
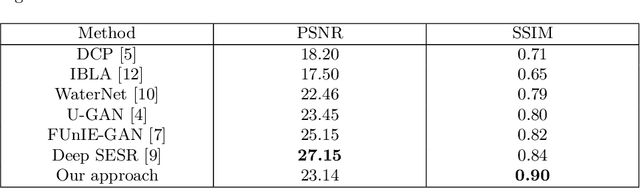
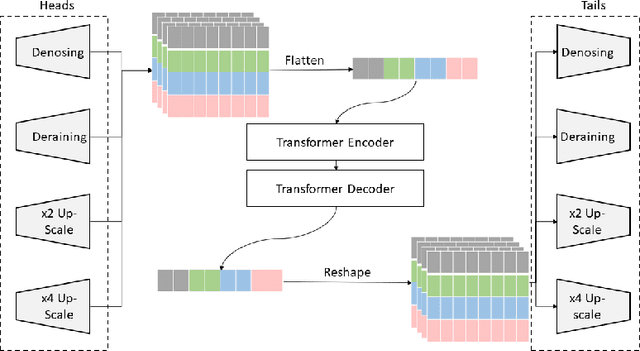
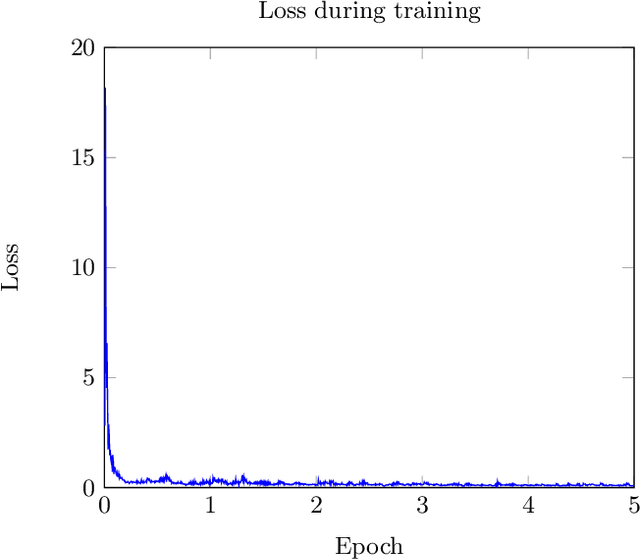
The goal of this work is to apply a denoising image transformer to remove the distortion from underwater images and compare it with other similar approaches. Automatic restoration of underwater images plays an important role since it allows to increase the quality of the images, without the need for more expensive equipment. This is a critical example of the important role of the machine learning algorithms to support marine exploration and monitoring, reducing the need for human intervention like the manual processing of the images, thus saving time, effort, and cost. This paper is the first application of the image transformer-based approach called "Pre-Trained Image Processing Transformer" to underwater images. This approach is tested on the UFO-120 dataset, containing 1500 images with the corresponding clean images.