 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEOS-Bench: A Comprehensive Benchmark for Earth Observation Satellite Scheduling
Apr 28, 2026Earth observation satellite imaging scheduling is a challenging NP-hard combinatorial optimisation problem central to space mission operations. While next-generation agile Earth observation satellites (EOS) increase operational flexibility, they also significantly raise scheduling complexity. The lack of a unified, open-source benchmark makes it difficult to compare algorithms across studies. This paper introduces EOS-Bench, a comprehensive framework for systematic and reproducible evaluation of scheduling methods. By integrating high-fidelity orbital dynamics and platform constraints, EOS-Bench generates 1,390 scenarios and 13,900 benchmark instances, spanning from small-scale validation cases to large coordination problems with up to 1,000 satellites and 10,000 requests. We further propose a scenario characterisation scheme to quantify structural difficulty based on factors such as opportunity density, task flexibility, conflict intensity, and satellite congestion. A multidimensional evaluation protocol is introduced, assessing performance across five metrics: task profit, completion rate, workload balance, timeliness, and runtime. The framework is evaluated using mixed-integer programming, heuristics, meta-heuristics, and deep reinforcement learning across both agile and non-agile settings. Results show that EOS-Bench effectively distinguishes solver performance across scales and conditions, revealing trade-offs between solution quality and computational efficiency, and providing deeper insight into scenario complexity. EOS-Bench offers a unified and extensible open testbed for advancing research in Earth observation satellite scheduling. The code and data are available at https://github.com/Ethan19YQ/EOS-Bench.
DANCE: Dynamic 3D CNN Pruning: Joint Frame, Channel, and Feature Adaptation for Energy Efficiency on the Edge
Mar 18, 2026Modern convolutional neural networks (CNNs) are workhorses for video and image processing, but fail to adapt to the computational complexity of input samples in a dynamic manner to minimize energy consumption. In this research, we propose DANCE, a fine-grained, input-aware, dynamic pruning framework for 3D CNNs to maximize power efficiency with negligible to zero impact on performance. In the proposed two-step approach, the first step is called activation variability amplification (AVA), and the 3D CNN model is retrained to increase the variance of the magnitude of neuron activations across the network in this step, facilitating pruning decisions across diverse CNN input scenarios. In the second step, called adaptive activation pruning (AAP), a lightweight activation controller network is trained to dynamically prune frames, channels, and features of 3D convolutional layers of the network (different for each layer), based on statistics of the outputs of the first layer of the network. Our method achieves substantial savings in multiply-accumulate (MAC) operations and memory accesses by introducing sparsity within convolutional layers. Hardware validation on the NVIDIA Jetson Nano GPU and the Qualcomm Snapdragon 8 Gen 1 platform demonstrates respective speedups of 1.37X and 2.22X, achieving up to 1.47X higher energy efficiency compared to the state of the art.
RESOLVE: Relational Reasoning with Symbolic and Object-Level Features Using Vector Symbolic Processing
Nov 13, 2024Modern transformer-based encoder-decoder architectures struggle with reasoning tasks due to their inability to effectively extract relational information between input objects (data/tokens). Recent work introduced the Abstractor module, embedded between transformer layers, to address this gap. However, the Abstractor layer while excelling at capturing relational information (pure relational reasoning), faces challenges in tasks that require both object and relational-level reasoning (partial relational reasoning). To address this, we propose RESOLVE, a neuro-vector symbolic architecture that combines object-level features with relational representations in high-dimensional spaces, using fast and efficient operations such as bundling (summation) and binding (Hadamard product) allowing both object-level features and relational representations to coexist within the same structure without interfering with one another. RESOLVE is driven by a novel attention mechanism that operates in a bipolar high dimensional space, allowing fast attention score computation compared to the state-of-the-art. By leveraging this design, the model achieves both low compute latency and memory efficiency. RESOLVE also offers better generalizability while achieving higher accuracy in purely relational reasoning tasks such as sorting as well as partial relational reasoning tasks such as math problem-solving compared to state-of-the-art methods.
LARS-VSA: A Vector Symbolic Architecture For Learning with Abstract Rules
May 23, 2024



Human cognition excels at symbolic reasoning, deducing abstract rules from limited samples. This has been explained using symbolic and connectionist approaches, inspiring the development of a neuro-symbolic architecture that combines both paradigms. In parallel, recent studies have proposed the use of a "relational bottleneck" that separates object-level features from abstract rules, allowing learning from limited amounts of data . While powerful, it is vulnerable to the curse of compositionality meaning that object representations with similar features tend to interfere with each other. In this paper, we leverage hyperdimensional computing, which is inherently robust to such interference to build a compositional architecture. We adapt the "relational bottleneck" strategy to a high-dimensional space, incorporating explicit vector binding operations between symbols and relational representations. Additionally, we design a novel high-dimensional attention mechanism that leverages this relational representation. Our system benefits from the low overhead of operations in hyperdimensional space, making it significantly more efficient than the state of the art when evaluated on a variety of test datasets, while maintaining higher or equal accuracy.
A Novel Hyperdimensional Computing Framework for Online Time Series Forecasting on the Edge
Feb 03, 2024In recent years, both online and offline deep learning models have been developed for time series forecasting. However, offline deep forecasting models fail to adapt effectively to changes in time-series data, while online deep forecasting models are often expensive and have complex training procedures. In this paper, we reframe the online nonlinear time-series forecasting problem as one of linear hyperdimensional time-series forecasting. Nonlinear low-dimensional time-series data is mapped to high-dimensional (hyperdimensional) spaces for linear hyperdimensional prediction, allowing fast, efficient and lightweight online time-series forecasting. Our framework, TSF-HD, adapts to time-series distribution shifts using a novel co-training framework for its hyperdimensional mapping and its linear hyperdimensional predictor. TSF-HD is shown to outperform the state of the art, while having reduced inference latency, for both short-term and long-term time series forecasting. Our code is publicly available at http://github.com/tsfhd2024/tsf-hd.git
Gaussian Control Barrier Functions : A Non-Parametric Paradigm to Safety
Mar 29, 2022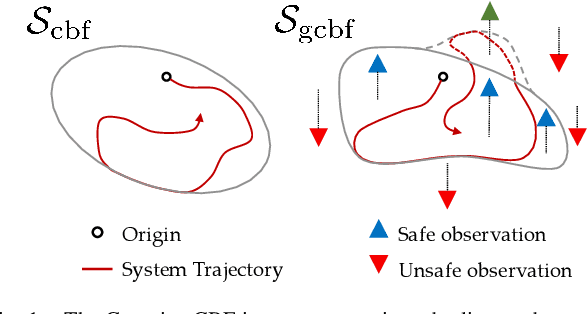
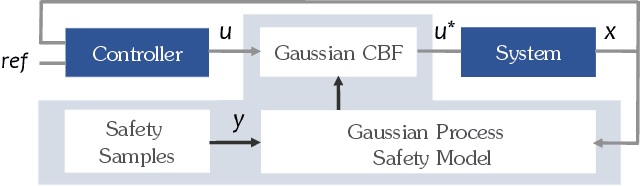
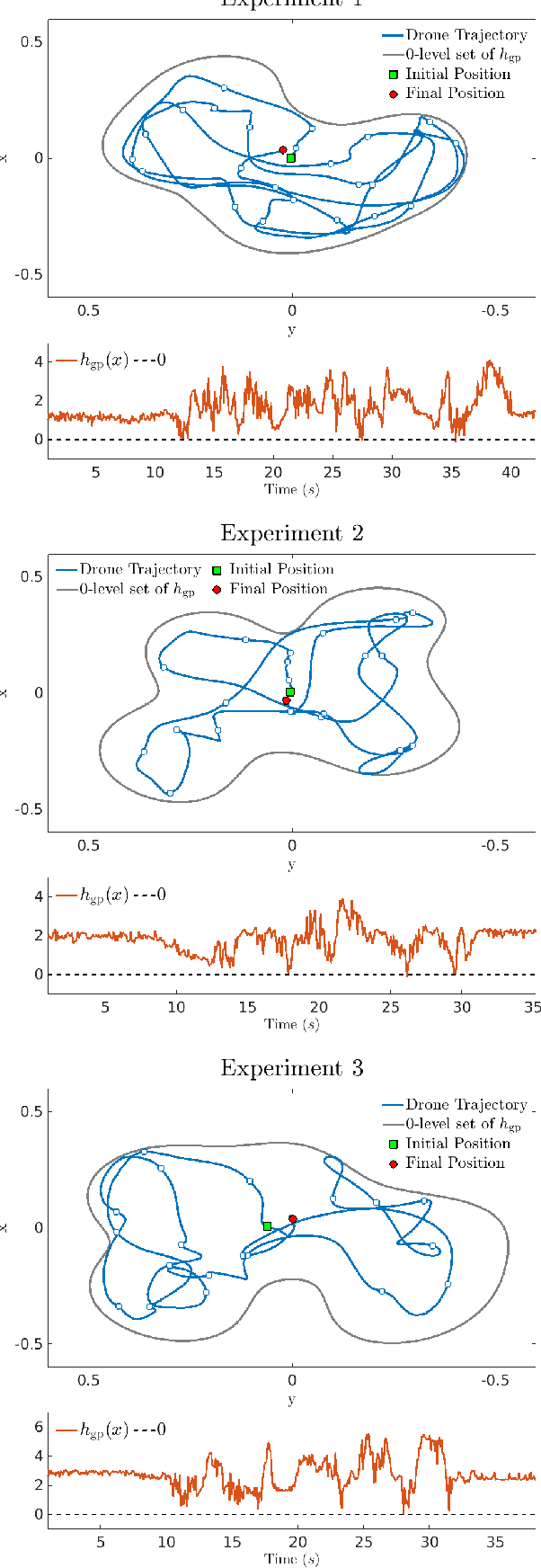
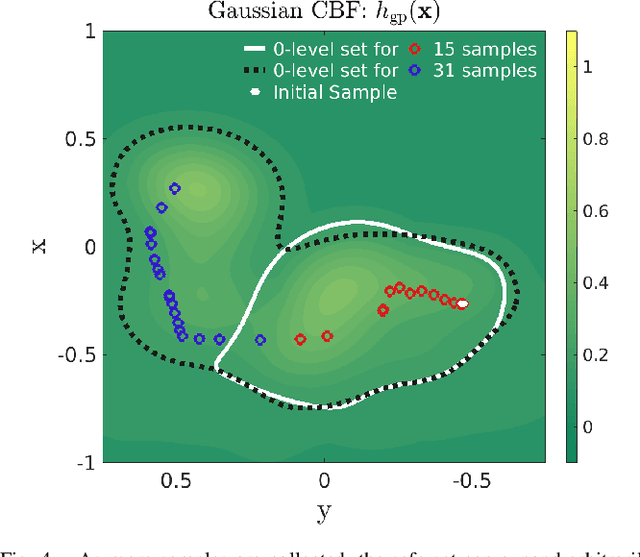
Inspired by the success of control barrier functions (CBFs) in addressing safety, and the rise of data-driven techniques for modeling functions, we propose a non-parametric approach for online synthesis of CBFs using Gaussian Processes (GPs). Mathematical constructs such as CBFs have achieved safety by designing a candidate function a priori. However, designing such a candidate function can be challenging. A practical example of such a setting would be to design a CBF in a disaster recovery scenario where safe and navigable regions need to be determined. The decision boundary for safety in such an example is unknown and cannot be designed a priori. In our approach, we work with safety samples or observations to construct the CBF online by assuming a flexible GP prior on these samples, and term our formulation as a Gaussian CBF. GPs have favorable properties, in addition to being non-parametric, such as analytical tractability and robust uncertainty estimation. This allows realizing the posterior components with high safety guarantees by incorporating variance estimation, while also computing associated partial derivatives in closed-form to achieve safe control. Moreover, the synthesized safety function from our approach allows changing the corresponding safe set arbitrarily based on the data, thus allowing non-convex safe sets. We validate our approach experimentally on a quadrotor by demonstrating safe control for fixed but arbitrary safe sets and collision avoidance where the safe set is constructed online. Finally, we juxtapose Gaussian CBFs with regular CBFs in the presence of noisy states to highlight its flexibility and robustness to noise. The experiment video can be seen at: https://youtu.be/HX6uokvCiGk
TESDA: Transform Enabled Statistical Detection of Attacks in Deep Neural Networks
Oct 16, 2021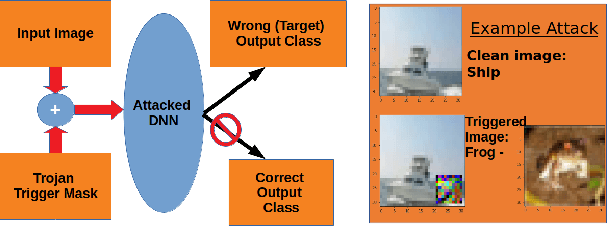
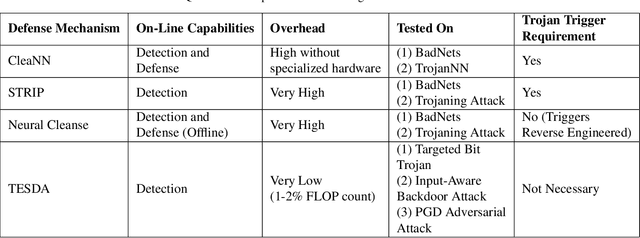
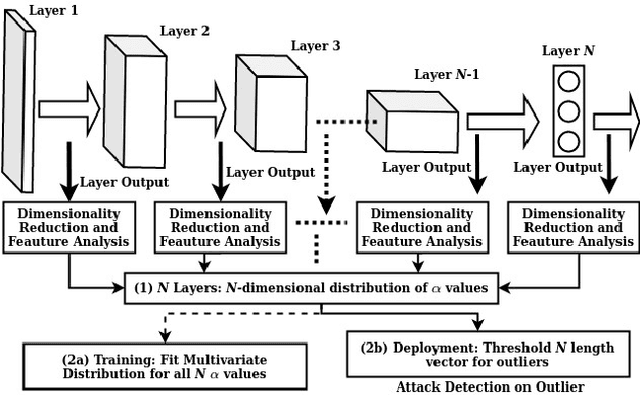
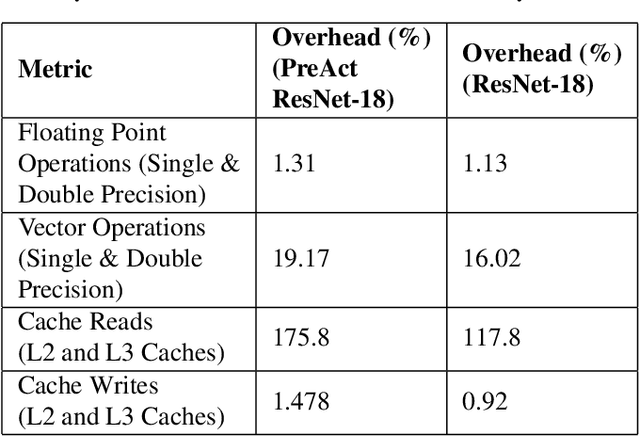
Deep neural networks (DNNs) are now the de facto choice for computer vision tasks such as image classification. However, their complexity and "black box" nature often renders the systems they're deployed in vulnerable to a range of security threats. Successfully identifying such threats, especially in safety-critical real-world applications is thus of utmost importance, but still very much an open problem. We present TESDA, a low-overhead, flexible, and statistically grounded method for {online detection} of attacks by exploiting the discrepancies they cause in the distributions of intermediate layer features of DNNs. Unlike most prior work, we require neither dedicated hardware to run in real-time, nor the presence of a Trojan trigger to detect discrepancies in behavior. We empirically establish our method's usefulness and practicality across multiple architectures, datasets and diverse attacks, consistently achieving detection coverages of above 95% with operation count overheads as low as 1-2%.
Multi-Sparse Gaussian Process: Learning based Semi-Parametric Control
Mar 03, 2020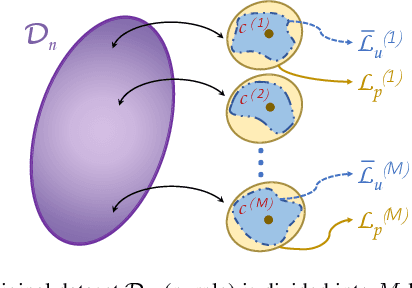
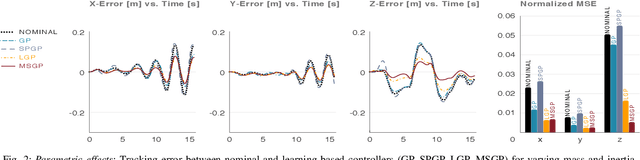
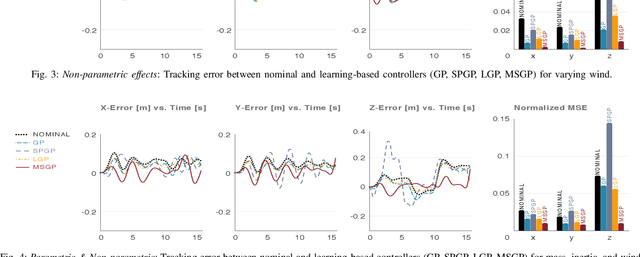
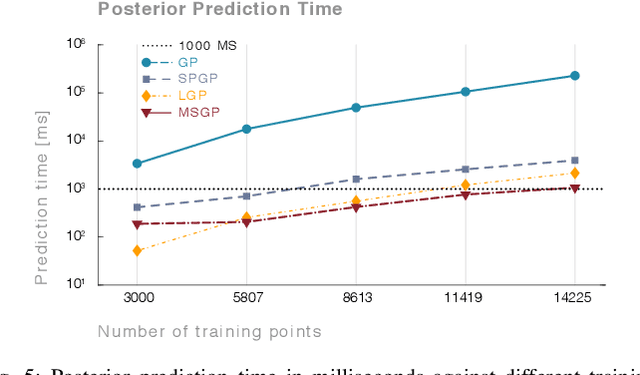
A key challenge with controlling complex dynamical systems is to accurately model them. However, this requirement is very hard to satisfy in practice. Data-driven approaches such as Gaussian processes (GPs) have proved quite effective by employing regression based methods to capture the unmodeled dynamical effects. However, GPs scale cubically with data, and is often a challenge to perform real-time regression. In this paper, we propose a semi-parametric framework exploiting sparsity for learning-based control. We combine the parametric model of the system with multiple sparse GP models to capture any unmodeled dynamics. Multi-Sparse Gaussian Process (MSGP) divides the original dataset into multiple sparse models with unique hyperparameters for each model. Thereby, preserving the richness and uniqueness of each sparse model. For a query point, a weighted sparse posterior prediction is performed based on $N$ neighboring sparse models. Hence, the prediction complexity is significantly reduced from $\mathcal{O}(n^3)$ to $\mathcal{O}(Npu^2)$, where $p$ and $u$ are data points and pseudo-inputs respectively for each sparse model. We validate MSGP's learning performance for a quadrotor using a geometric controller in simulation. Comparison with GP, sparse GP, and local GP shows that MSGP has higher prediction accuracy than sparse and local GP, while significantly lower time complexity than all three. We also validate MSGP on a hardware quadrotor for unmodeled mass, inertia, and disturbances. The experiment video can be seen at: https://youtu.be/zUk1ISux6ao
Online Parameter Estimation for Safety-Critical Systems with Gaussian Processes
Feb 18, 2020
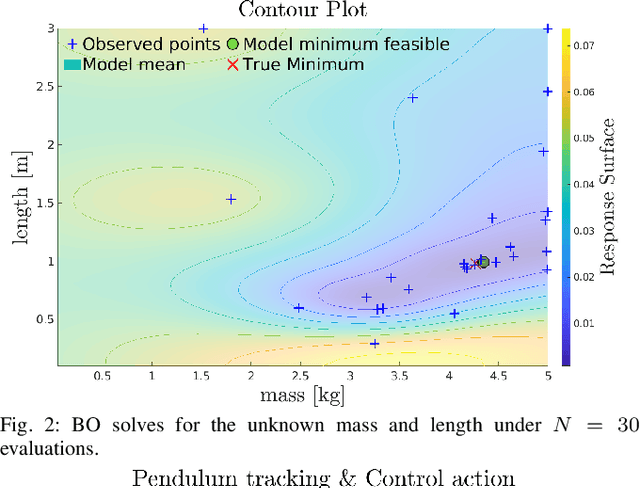
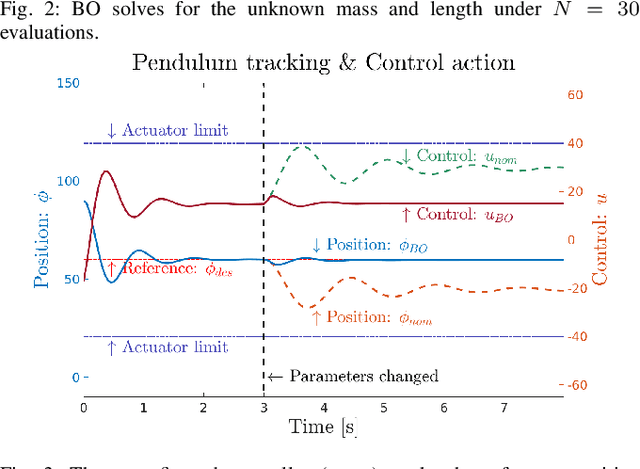
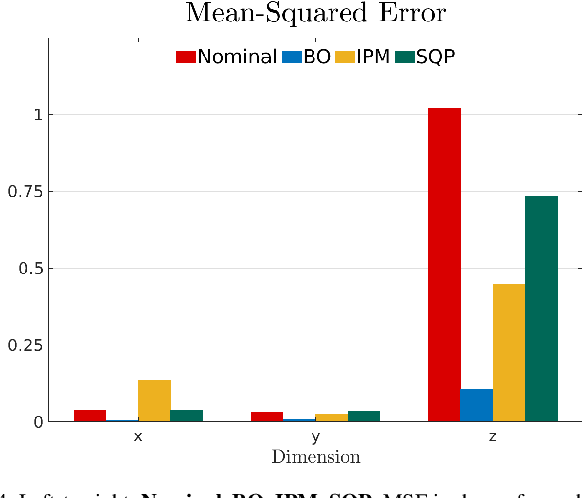
Parameter estimation is crucial for modeling, tracking, and control of complex dynamical systems. However, parameter uncertainties can compromise system performance under a controller relying on nominal parameter values. Typically, parameters are estimated using numerical regression approaches framed as inverse problems. However, they suffer from non-uniqueness due to existence of multiple local optima, reliance on gradients, numerous experimental data, or stability issues. Addressing these drawbacks, we present a Bayesian optimization framework based on Gaussian processes (GPs) for online parameter estimation. It uses an efficient search strategy over a response surface in the parameter space for finding the global optima with minimal function evaluations. The response surface is modeled as correlated surrogates using GPs on noisy data. The GP posterior predictive variance is exploited for smart adaptive sampling. This balances the exploration versus exploitation trade-off which is key in reaching the global optima under limited budget. We demonstrate our technique on an actuated planar pendulum and safety-critical quadrotor in simulation with changing parameters. We also benchmark our results against solvers using interior point method and sequential quadratic program. By reconfiguring the controller with new optimized parameters iteratively, we drastically improve trajectory tracking of the system versus the nominal case and other solvers.