 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Parameter Estimation for Safety-Critical Systems with Gaussian Processes
Paper and Code
Feb 18, 2020
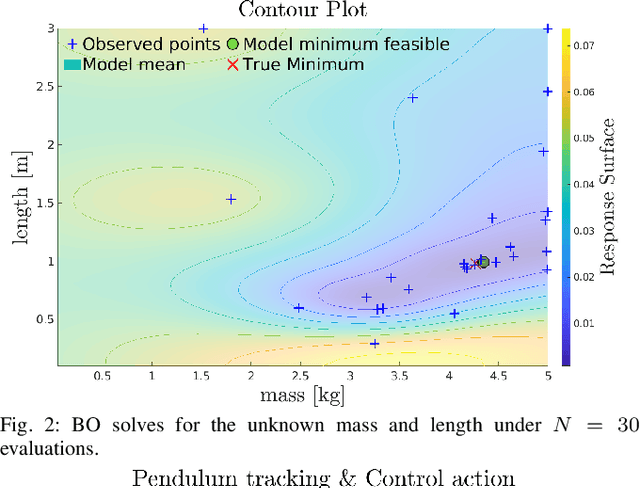
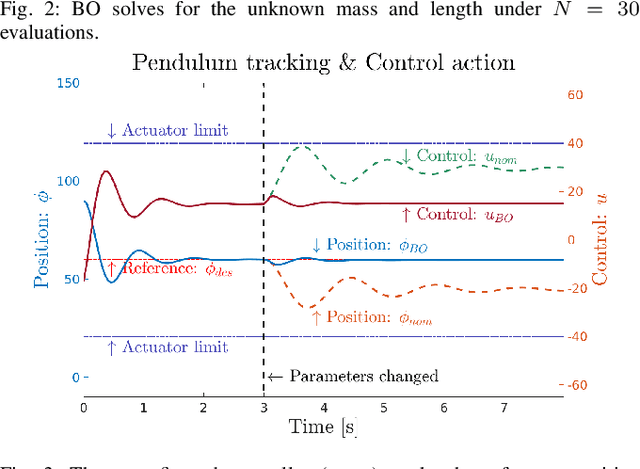
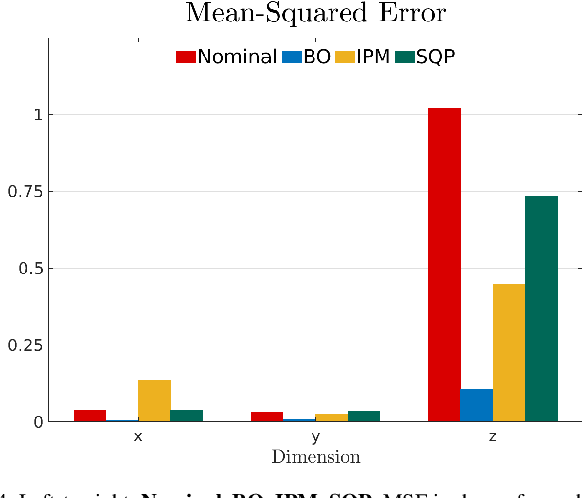
Parameter estimation is crucial for modeling, tracking, and control of complex dynamical systems. However, parameter uncertainties can compromise system performance under a controller relying on nominal parameter values. Typically, parameters are estimated using numerical regression approaches framed as inverse problems. However, they suffer from non-uniqueness due to existence of multiple local optima, reliance on gradients, numerous experimental data, or stability issues. Addressing these drawbacks, we present a Bayesian optimization framework based on Gaussian processes (GPs) for online parameter estimation. It uses an efficient search strategy over a response surface in the parameter space for finding the global optima with minimal function evaluations. The response surface is modeled as correlated surrogates using GPs on noisy data. The GP posterior predictive variance is exploited for smart adaptive sampling. This balances the exploration versus exploitation trade-off which is key in reaching the global optima under limited budget. We demonstrate our technique on an actuated planar pendulum and safety-critical quadrotor in simulation with changing parameters. We also benchmark our results against solvers using interior point method and sequential quadratic program. By reconfiguring the controller with new optimized parameters iteratively, we drastically improve trajectory tracking of the system versus the nominal case and other solvers.