 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepMPCVS: Deep Model Predictive Control for Visual Servoing
May 03, 2021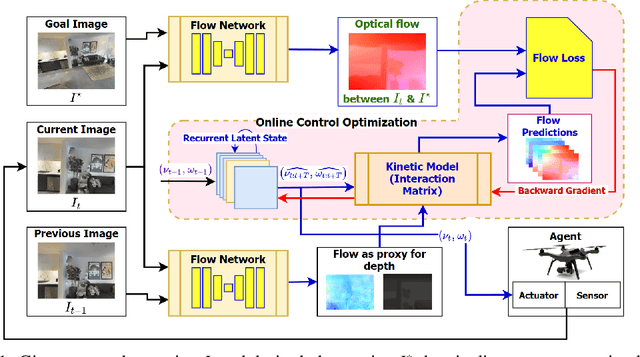
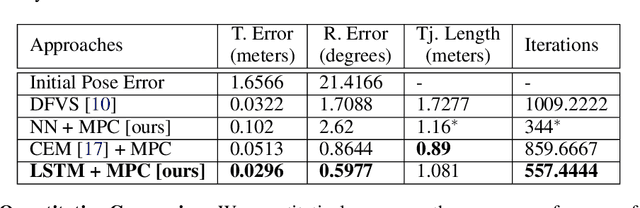
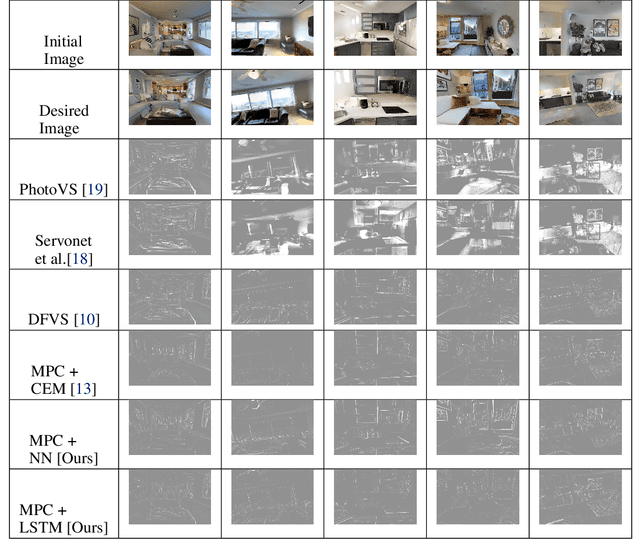
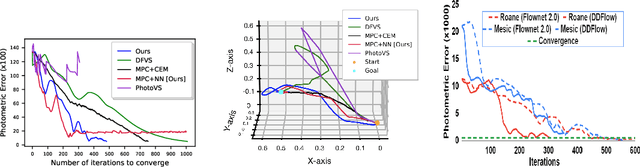
The simplicity of the visual servoing approach makes it an attractive option for tasks dealing with vision-based control of robots in many real-world applications. However, attaining precise alignment for unseen environments pose a challenge to existing visual servoing approaches. While classical approaches assume a perfect world, the recent data-driven approaches face issues when generalizing to novel environments. In this paper, we aim to combine the best of both worlds. We present a deep model predictive visual servoing framework that can achieve precise alignment with optimal trajectories and can generalize to novel environments. Our framework consists of a deep network for optical flow predictions, which are used along with a predictive model to forecast future optical flow. For generating an optimal set of velocities we present a control network that can be trained on the fly without any supervision. Through extensive simulations on photo-realistic indoor settings of the popular Habitat framework, we show significant performance gain due to the proposed formulation vis-a-vis recent state-of-the-art methods. Specifically, we show a faster convergence and an improved performance in trajectory length over recent approaches.
* Accepted at 4th Annual Conference on Robot Learning, CoRL 2020, Cambridge, MA, USA, November 16 - November 18, 2020