 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Road Ahead in Autonomous Driving: The KITScenes Multimodal Dataset
Jun 01, 2026Existing autonomous driving datasets have enabled major progress, but fall short in sensor fidelity, map completeness, or geographic diversity. We present KITScenes Multimodal, a European dataset built around high-fidelity sensors and maps. Our fully synchronized sensor suite combines high-resolution global-shutter cameras, long-range lidar beyond 400m, 4D imaging radar, and redundant GNSS/INS localization. Our HD maps are, to our knowledge, the most complete of any sensor dataset, validated through autonomous driving trials on open-source software. For the first time in a public dataset, all driving-relevant traffic elements, such as traffic lights, are mapped in 3D to a reprojection-accurate level with full topological connectivity. Recorded in cities with irregular street layouts and mixed traffic modes, our dataset complements existing datasets by broadening the available geographic diversity. We also introduce four benchmarks, each advancing spatial learning for embodied AI: online HD map construction, long-range depth estimation, novel view synthesis, and end-to-end driving. Project page: https://kitscenes.com/
Mosaic: An Extensible Framework for Composing Rule-Based and Learned Motion Planners
Apr 15, 2026Safe and explainable motion planning remains a central challenge in autonomous driving. While rule-based planners offer predictable and explainable behavior, they often fail to grasp the complexity and uncertainty of real-world traffic. Conversely, learned planners exhibit strong adaptability but suffer from reduced transparency and occasional safety violations. We introduce Mosaic, an extensible framework for structured decision-making that integrates both paradigms through arbitration graphs. By decoupling trajectory verification and scoring from the generation of trajectories by individual planners, every decision becomes transparent and traceable. Trajectory verification at a higher level introduces redundancy between the planners, limiting emergency braking to the rare case where all planners fail to produce a valid trajectory. Through unified scoring and optimal trajectory selection, rule-based and learned planners with complementary strengths and weaknesses can be combined to yield the best of both worlds. In experimental evaluation on nuPlan, Mosaic achieves 95.48 CLS-NR and 93.98 CLS-R on the Val14 closed-loop benchmark, setting a new state of the art, while reducing at-fault collisions by 30% compared to either planner in isolation. On the interPlan benchmark, focused on highly interactive and difficult scenarios, Mosaic scores 54.30 CLS-R, outperforming its best constituent planner by 23.3% - all without retraining or requiring additional data. The code is available at github.com/KIT-MRT/mosaic.
FlowDrive: moderated flow matching with data balancing for trajectory planning
Sep 26, 2025Learning-based planners are sensitive to the long-tailed distribution of driving data. Common maneuvers dominate datasets, while dangerous or rare scenarios are sparse. This imbalance can bias models toward the frequent cases and degrade performance on critical scenarios. To tackle this problem, we compare balancing strategies for sampling training data and find reweighting by trajectory pattern an effective approach. We then present FlowDrive, a flow-matching trajectory planner that learns a conditional rectified flow to map noise directly to trajectory distributions with few flow-matching steps. We further introduce moderated, in-the-loop guidance that injects small perturbation between flow steps to systematically increase trajectory diversity while remaining scene-consistent. On nuPlan and the interaction-focused interPlan benchmarks, FlowDrive achieves state-of-the-art results among learning-based planners and approaches methods with rule-based refinements. After adding moderated guidance and light post-processing (FlowDrive*), it achieves overall state-of-the-art performance across nearly all benchmark splits.
Generative AI for Autonomous Driving: A Review
May 21, 2025Generative AI (GenAI) is rapidly advancing the field of Autonomous Driving (AD), extending beyond traditional applications in text, image, and video generation. We explore how generative models can enhance automotive tasks, such as static map creation, dynamic scenario generation, trajectory forecasting, and vehicle motion planning. By examining multiple generative approaches ranging from Variational Autoencoder (VAEs) over Generative Adversarial Networks (GANs) and Invertible Neural Networks (INNs) to Generative Transformers (GTs) and Diffusion Models (DMs), we highlight and compare their capabilities and limitations for AD-specific applications. Additionally, we discuss hybrid methods integrating conventional techniques with generative approaches, and emphasize their improved adaptability and robustness. We also identify relevant datasets and outline open research questions to guide future developments in GenAI. Finally, we discuss three core challenges: safety, interpretability, and realtime capabilities, and present recommendations for image generation, dynamic scenario generation, and planning.
Divide and Merge: Motion and Semantic Learning in End-to-End Autonomous Driving
Feb 11, 2025



Perceiving the environment and its changes over time corresponds to two fundamental yet heterogeneous types of information: semantics and motion. Previous end-to-end autonomous driving works represent both types of information in a single feature vector. However, including motion tasks, such as prediction and planning, always impairs detection and tracking performance, a phenomenon known as negative transfer in multi-task learning. To address this issue, we propose Neural-Bayes motion decoding, a novel parallel detection, tracking, and prediction method separating semantic and motion learning, similar to the Bayes filter. Specifically, we employ a set of learned motion queries that operate in parallel with the detection and tracking queries, sharing a unified set of recursively updated reference points. Moreover, we employ interactive semantic decoding to enhance information exchange in semantic tasks, promoting positive transfer. Experiments on the nuScenes dataset show improvements of 5% in detection and 11% in tracking. Our method achieves state-of-the-art collision rates in open-loop planning evaluation without any modifications to the planning module.
JointMotion: Joint Self-supervision for Joint Motion Prediction
Mar 08, 2024



We present JointMotion, a self-supervised learning method for joint motion prediction in autonomous driving. Our method includes a scene-level objective connecting motion and environments, and an instance-level objective to refine learned representations. Our evaluations show that these objectives are complementary and outperform recent contrastive and autoencoding methods as pre-training for joint motion prediction. Furthermore, JointMotion adapts to all common types of environment representations used for motion prediction (i.e., agent-centric, scene-centric, and pairwise relative), and enables effective transfer learning between the Waymo Open Motion and the Argoverse 2 Forecasting datasets. Notably, our method improves the joint final displacement error of Wayformer, Scene Transformer, and HPTR by 3%, 7%, and 11%, respectively.
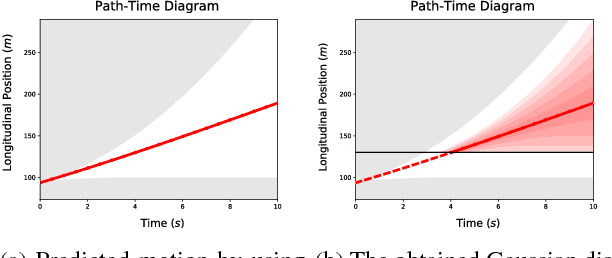
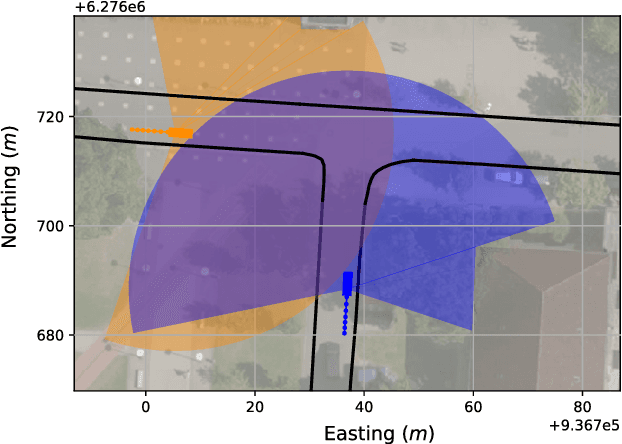
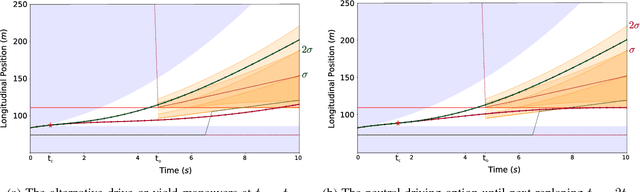
Decision-theoretic MPC: Motion Planning with Weighted Maneuver Preferences Under Uncertainty
Oct 27, 2023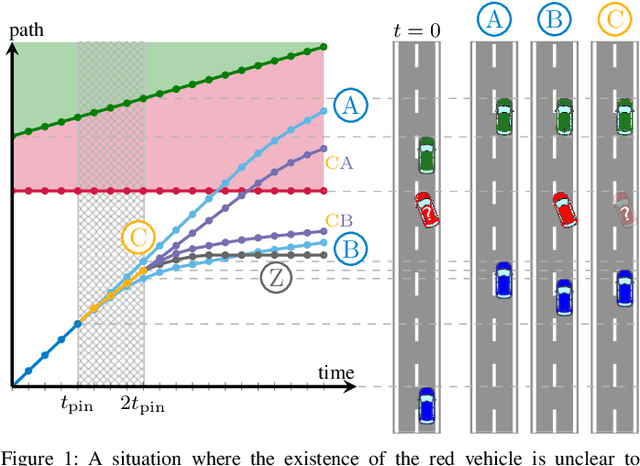
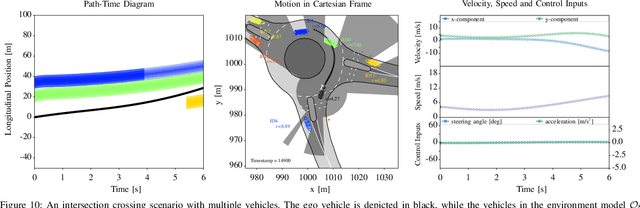
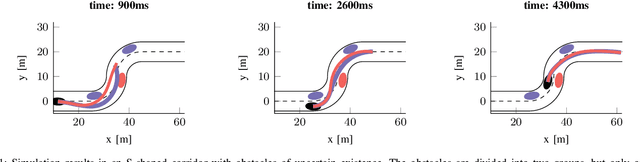
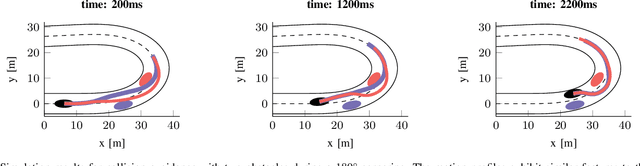
Continuous optimization based motion planners require deciding on a maneuver homotopy before optimizing the trajectory. Under uncertainty, maneuver intentions of other participants can be unclear, and the vehicle might not be able to decide on the most suitable maneuver. This work introduces a method that incorporates multiple maneuver preferences in planning. It optimizes the trajectory by considering weighted maneuver preferences together with uncertainties ranging from perception to prediction while ensuring the feasibility of a chance-constrained fallback option. Evaluations in both driving experiments and simulation studies show enhanced interaction capabilities and comfort levels compared to conventional planners, which consider only a single maneuver.
Efficient Sampling in POMDPs with Lipschitz Bandits for Motion Planning in Continuous Spaces
Jun 08, 2021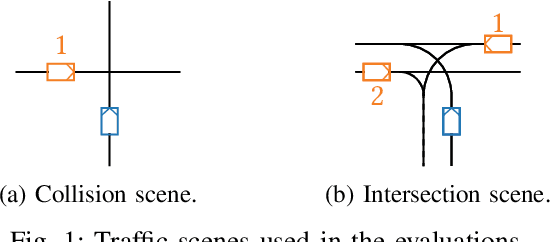
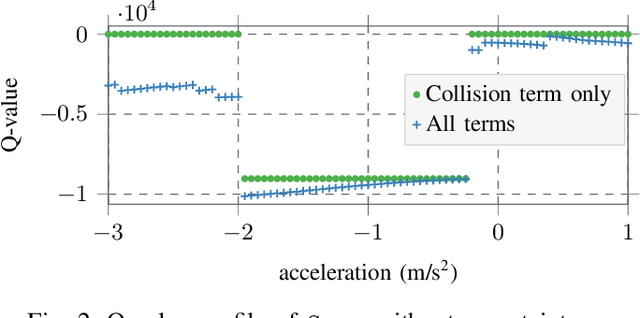
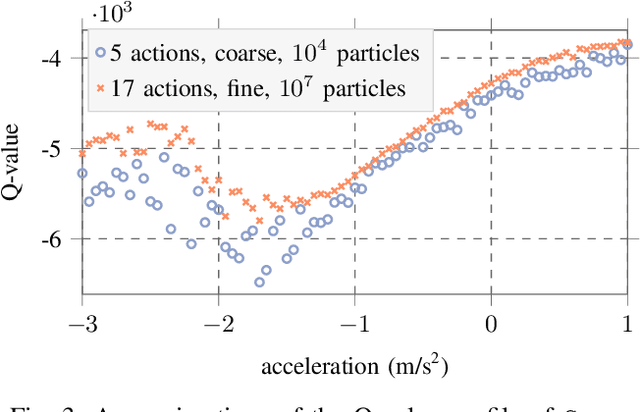
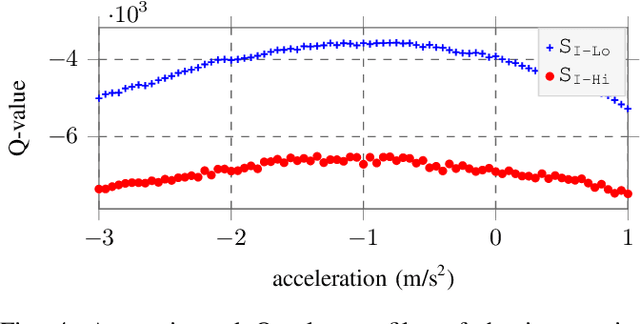
Decision making under uncertainty can be framed as a partially observable Markov decision process (POMDP). Finding exact solutions of POMDPs is generally computationally intractable, but the solution can be approximated by sampling-based approaches. These sampling-based POMDP solvers rely on multi-armed bandit (MAB) heuristics, which assume the outcomes of different actions to be uncorrelated. In some applications, like motion planning in continuous spaces, similar actions yield similar outcomes. In this paper, we utilize variants of MAB heuristics that make Lipschitz continuity assumptions on the outcomes of actions to improve the efficiency of sampling-based planning approaches. We demonstrate the effectiveness of this approach in the context of motion planning for automated driving.
Decision-Time Postponing Motion Planning for Combinatorial Uncertain Maneuvering
Dec 13, 2020
Motion planning involves decision making among combinatorial maneuver variants in urban driving. A planner must consider uncertainties and associated risks of the maneuver variants, and subsequently select a maneuver alternative. In this paper we present a planning approach that considers the uncertainties in the prediction and, in case of high uncertainty, postpones the combinatorial decision making to a later time within the planning horizon. With our proposed approach, safe but at the same time not overconservative motion is planned.
* 7 pages, 5 figures