 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLongTail Driving Scenarios with Reasoning Traces: The KITScenes LongTail Dataset
Mar 24, 2026In real-world domains such as self-driving, generalization to rare scenarios remains a fundamental challenge. To address this, we introduce a new dataset designed for end-to-end driving that focuses on long-tail driving events. We provide multi-view video data, trajectories, high-level instructions, and detailed reasoning traces, facilitating in-context learning and few-shot generalization. The resulting benchmark for multimodal models, such as VLMs and VLAs, goes beyond safety and comfort metrics by evaluating instruction following and semantic coherence between model outputs. The multilingual reasoning traces in English, Spanish, and Chinese are from domain experts with diverse cultural backgrounds. Thus, our dataset is a unique resource for studying how different forms of reasoning affect driving competence. Our dataset is available at: https://hf.co/datasets/kit-mrt/kitscenes-longtail
XD-MAP: Cross-Modal Domain Adaptation using Semantic Parametric Mapping
Jan 20, 2026Until open-world foundation models match the performance of specialized approaches, the effectiveness of deep learning models remains heavily dependent on dataset availability. Training data must align not only with the target object categories but also with the sensor characteristics and modalities. To bridge the gap between available datasets and deployment domains, domain adaptation strategies are widely used. In this work, we propose a novel approach to transferring sensor-specific knowledge from an image dataset to LiDAR, an entirely different sensing domain. Our method XD-MAP leverages detections from a neural network on camera images to create a semantic parametric map. The map elements are modeled to produce pseudo labels in the target domain without any manual annotation effort. Unlike previous domain transfer approaches, our method does not require direct overlap between sensors and enables extending the angular perception range from a front-view camera to a full 360 view. On our large-scale road feature dataset, XD-MAP outperforms single shot baseline approaches by +19.5 mIoU for 2D semantic segmentation, +19.5 PQth for 2D panoptic segmentation, and +32.3 mIoU in 3D semantic segmentation. The results demonstrate the effectiveness of our approach achieving strong performance on LiDAR data without any manual labeling.
Generative AI for Autonomous Driving: A Review
May 21, 2025Generative AI (GenAI) is rapidly advancing the field of Autonomous Driving (AD), extending beyond traditional applications in text, image, and video generation. We explore how generative models can enhance automotive tasks, such as static map creation, dynamic scenario generation, trajectory forecasting, and vehicle motion planning. By examining multiple generative approaches ranging from Variational Autoencoder (VAEs) over Generative Adversarial Networks (GANs) and Invertible Neural Networks (INNs) to Generative Transformers (GTs) and Diffusion Models (DMs), we highlight and compare their capabilities and limitations for AD-specific applications. Additionally, we discuss hybrid methods integrating conventional techniques with generative approaches, and emphasize their improved adaptability and robustness. We also identify relevant datasets and outline open research questions to guide future developments in GenAI. Finally, we discuss three core challenges: safety, interpretability, and realtime capabilities, and present recommendations for image generation, dynamic scenario generation, and planning.
Divide and Merge: Motion and Semantic Learning in End-to-End Autonomous Driving
Feb 11, 2025



Perceiving the environment and its changes over time corresponds to two fundamental yet heterogeneous types of information: semantics and motion. Previous end-to-end autonomous driving works represent both types of information in a single feature vector. However, including motion tasks, such as prediction and planning, always impairs detection and tracking performance, a phenomenon known as negative transfer in multi-task learning. To address this issue, we propose Neural-Bayes motion decoding, a novel parallel detection, tracking, and prediction method separating semantic and motion learning, similar to the Bayes filter. Specifically, we employ a set of learned motion queries that operate in parallel with the detection and tracking queries, sharing a unified set of recursively updated reference points. Moreover, we employ interactive semantic decoding to enhance information exchange in semantic tasks, promoting positive transfer. Experiments on the nuScenes dataset show improvements of 5% in detection and 11% in tracking. Our method achieves state-of-the-art collision rates in open-loop planning evaluation without any modifications to the planning module.
Adversarial Attacked Teacher for Unsupervised Domain Adaptive Object Detection
Aug 18, 2024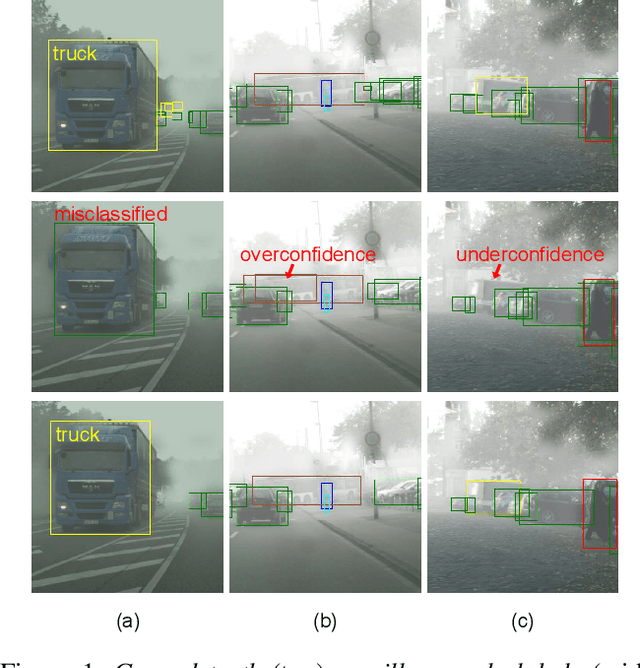
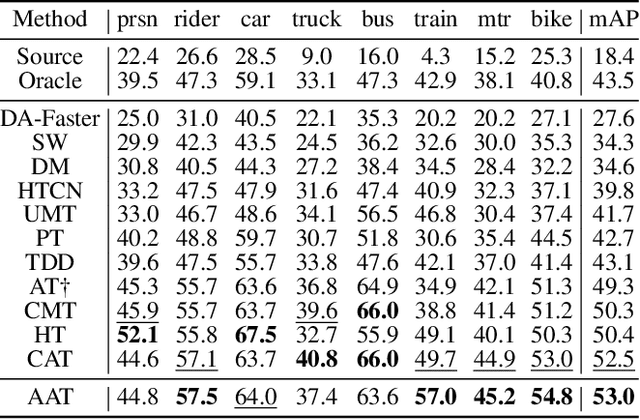
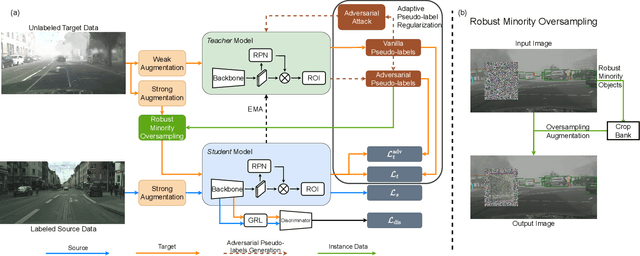
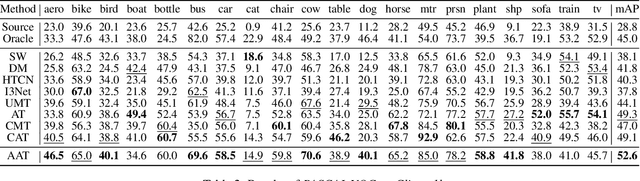
Object detectors encounter challenges in handling domain shifts. Cutting-edge domain adaptive object detection methods use the teacher-student framework and domain adversarial learning to generate domain-invariant pseudo-labels for self-training. However, the pseudo-labels generated by the teacher model tend to be biased towards the majority class and often mistakenly include overconfident false positives and underconfident false negatives. We reveal that pseudo-labels vulnerable to adversarial attacks are more likely to be low-quality. To address this, we propose a simple yet effective framework named Adversarial Attacked Teacher (AAT) to improve the quality of pseudo-labels. Specifically, we apply adversarial attacks to the teacher model, prompting it to generate adversarial pseudo-labels to correct bias, suppress overconfidence, and encourage underconfident proposals. An adaptive pseudo-label regularization is introduced to emphasize the influence of pseudo-labels with high certainty and reduce the negative impacts of uncertain predictions. Moreover, robust minority objects verified by pseudo-label regularization are oversampled to minimize dataset imbalance without introducing false positives. Extensive experiments conducted on various datasets demonstrate that AAT achieves superior performance, reaching 52.6 mAP on Clipart1k, surpassing the previous state-of-the-art by 6.7%.
Adversarial Defense Teacher for Cross-Domain Object Detection under Poor Visibility Conditions
Mar 23, 2024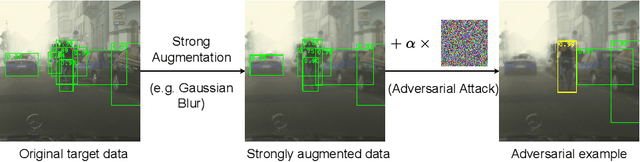
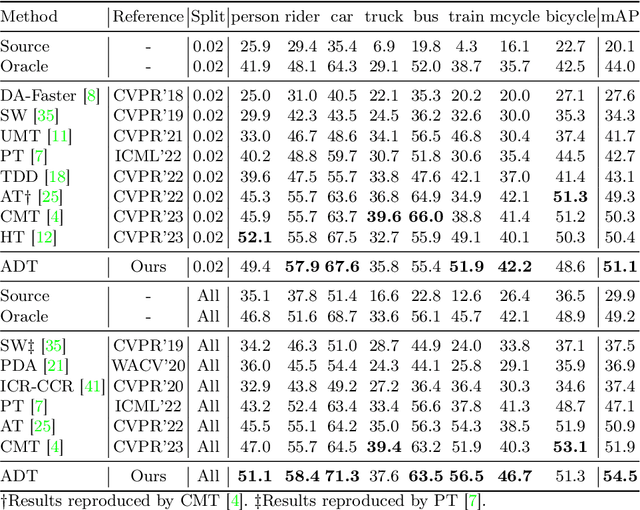
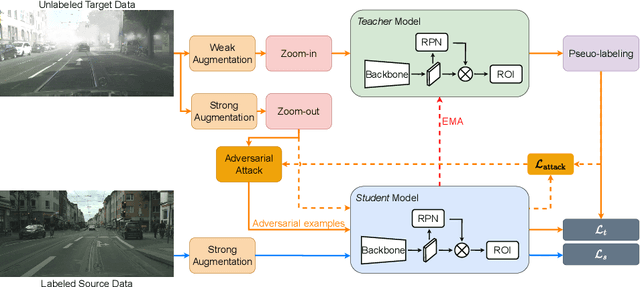
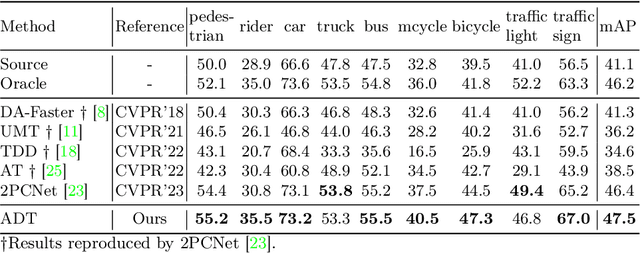
Existing object detectors encounter challenges in handling domain shifts between training and real-world data, particularly under poor visibility conditions like fog and night. Cutting-edge cross-domain object detection methods use teacher-student frameworks and compel teacher and student models to produce consistent predictions under weak and strong augmentations, respectively. In this paper, we reveal that manually crafted augmentations are insufficient for optimal teaching and present a simple yet effective framework named Adversarial Defense Teacher (ADT), leveraging adversarial defense to enhance teaching quality. Specifically, we employ adversarial attacks, encouraging the model to generalize on subtly perturbed inputs that effectively deceive the model. To address small objects under poor visibility conditions, we propose a Zoom-in Zoom-out strategy, which zooms-in images for better pseudo-labels and zooms-out images and pseudo-labels to learn refined features. Our results demonstrate that ADT achieves superior performance, reaching 54.5% mAP on Foggy Cityscapes, surpassing the previous state-of-the-art by 2.6% mAP.