 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecision-theoretic MPC: Motion Planning with Weighted Maneuver Preferences Under Uncertainty
Paper and Code
Oct 27, 2023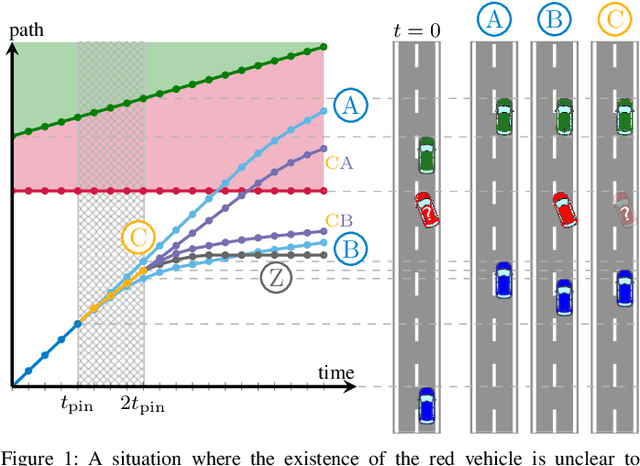
Continuous optimization based motion planners require deciding on a maneuver homotopy before optimizing the trajectory. Under uncertainty, maneuver intentions of other participants can be unclear, and the vehicle might not be able to decide on the most suitable maneuver. This work introduces a method that incorporates multiple maneuver preferences in planning. It optimizes the trajectory by considering weighted maneuver preferences together with uncertainties ranging from perception to prediction while ensuring the feasibility of a chance-constrained fallback option. Evaluations in both driving experiments and simulation studies show enhanced interaction capabilities and comfort levels compared to conventional planners, which consider only a single maneuver.