 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeX$^3$KD: Knowledge Distillation Across Modalities, Tasks and Stages for Multi-Camera 3D Object Detection
Paper and Code
Mar 03, 2023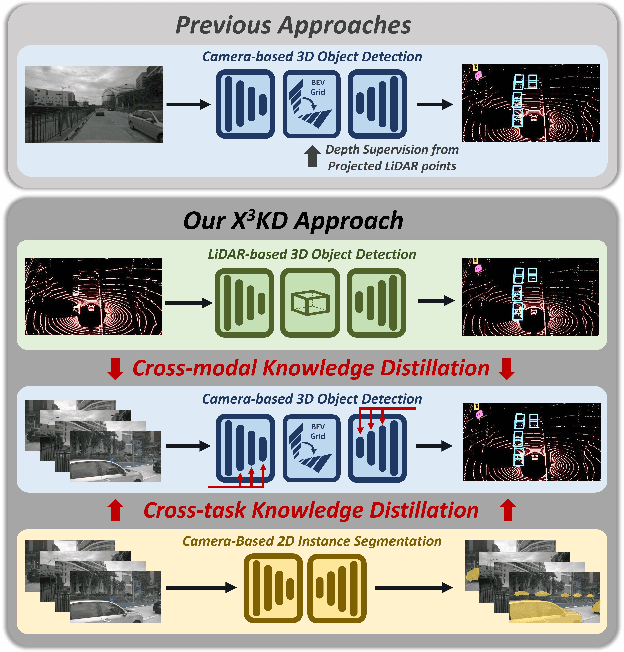
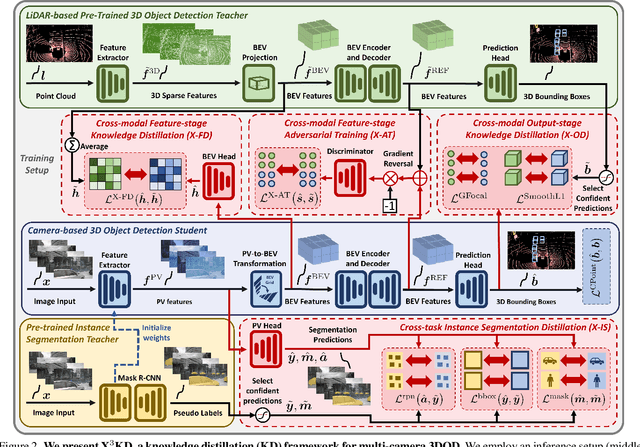
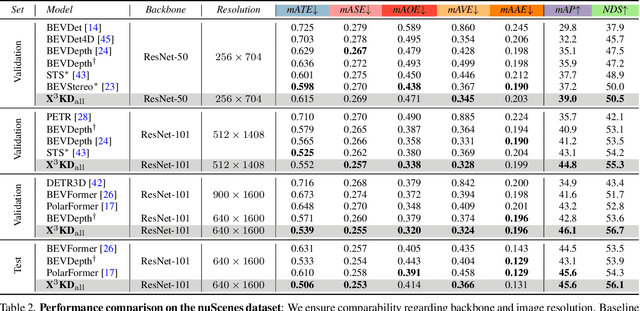
Recent advances in 3D object detection (3DOD) have obtained remarkably strong results for LiDAR-based models. In contrast, surround-view 3DOD models based on multiple camera images underperform due to the necessary view transformation of features from perspective view (PV) to a 3D world representation which is ambiguous due to missing depth information. This paper introduces X$^3$KD, a comprehensive knowledge distillation framework across different modalities, tasks, and stages for multi-camera 3DOD. Specifically, we propose cross-task distillation from an instance segmentation teacher (X-IS) in the PV feature extraction stage providing supervision without ambiguous error backpropagation through the view transformation. After the transformation, we apply cross-modal feature distillation (X-FD) and adversarial training (X-AT) to improve the 3D world representation of multi-camera features through the information contained in a LiDAR-based 3DOD teacher. Finally, we also employ this teacher for cross-modal output distillation (X-OD), providing dense supervision at the prediction stage. We perform extensive ablations of knowledge distillation at different stages of multi-camera 3DOD. Our final X$^3$KD model outperforms previous state-of-the-art approaches on the nuScenes and Waymo datasets and generalizes to RADAR-based 3DOD. Qualitative results video at https://youtu.be/1do9DPFmr38.