Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeV2VNet: Vehicle-to-Vehicle Communication for Joint Perception and Prediction
Paper and Code
Aug 17, 2020
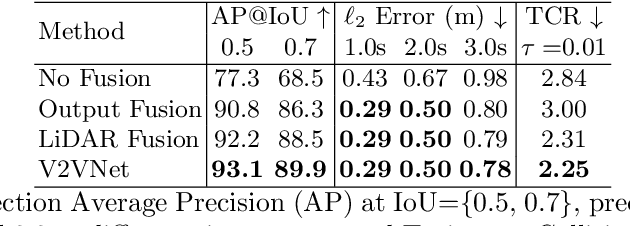
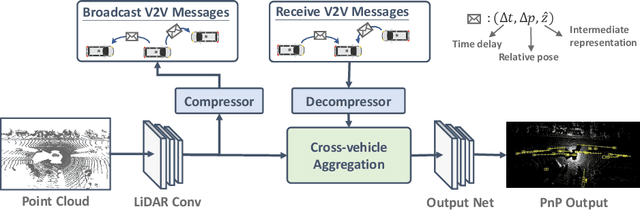
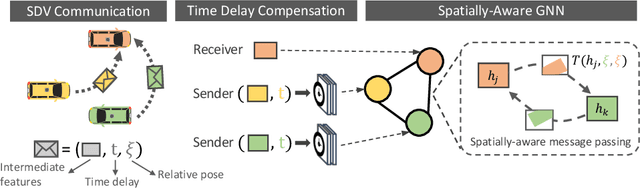
In this paper, we explore the use of vehicle-to-vehicle (V2V) communication to improve the perception and motion forecasting performance of self-driving vehicles. By intelligently aggregating the information received from multiple nearby vehicles, we can observe the same scene from different viewpoints. This allows us to see through occlusions and detect actors at long range, where the observations are very sparse or non-existent. We also show that our approach of sending compressed deep feature map activations achieves high accuracy while satisfying communication bandwidth requirements.
* ECCV 2020 (Oral)
View paper on