 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Discovery of Decision States for Transfer in Reinforcement Learning
Paper and Code
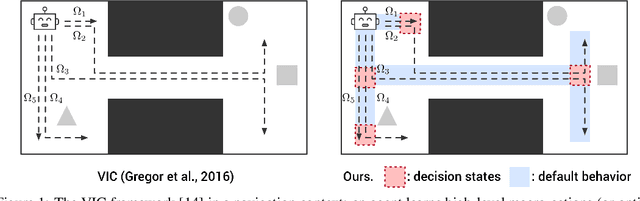
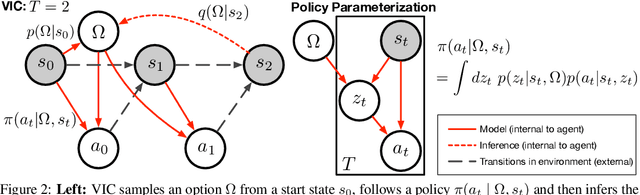
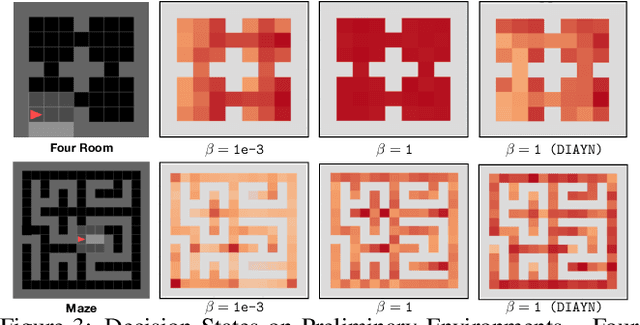
We present a hierarchical reinforcement learning (HRL) or options framework for identifying decision states. Informally speaking, these are states considered important by the agent's policy e.g. , for navigation, decision states would be crossroads or doors where an agent needs to make strategic decisions. While previous work (most notably Goyal et. al., 2019) discovers decision states in a task/goal specific (or 'supervised') manner, we do so in a goal-independent (or 'unsupervised') manner, i.e. entirely without any goal or extrinsic rewards. Our approach combines two hitherto disparate ideas - 1) \emph{intrinsic control} (Gregor et. al., 2016, Eysenbach et. al., 2018): learning a set of options that allow an agent to reliably reach a diverse set of states, and 2) \emph{information bottleneck} (Tishby et. al., 2000): penalizing mutual information between the option $\Omega$ and the states $s_t$ visited in the trajectory. The former encourages an agent to reliably explore the environment; the latter allows identification of decision states as the ones with high mutual information $I(\Omega; a_t | s_t)$ despite the bottleneck. Our results demonstrate that 1) our model learns interpretable decision states in an unsupervised manner, and 2) these learned decision states transfer to goal-driven tasks in new environments, effectively guide exploration, and improve performance.