 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderstanding Pixel-level 2D Image Semantics with 3D Keypoint Knowledge Engine
Paper and Code
Nov 21, 2021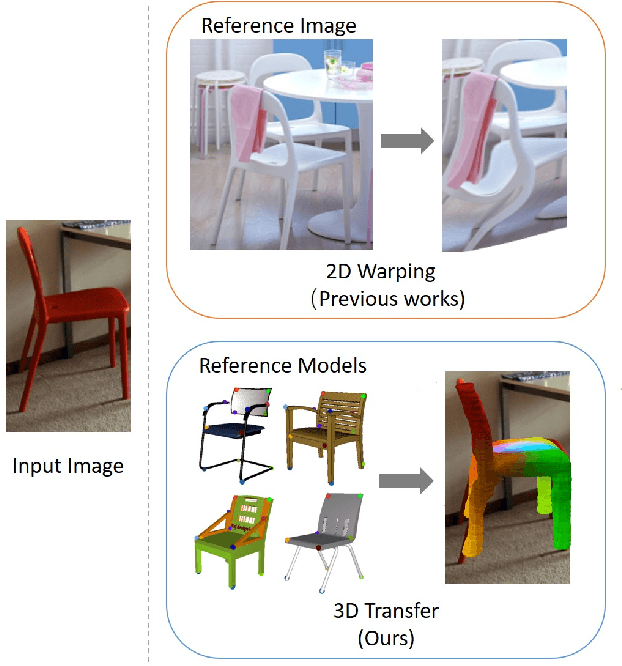

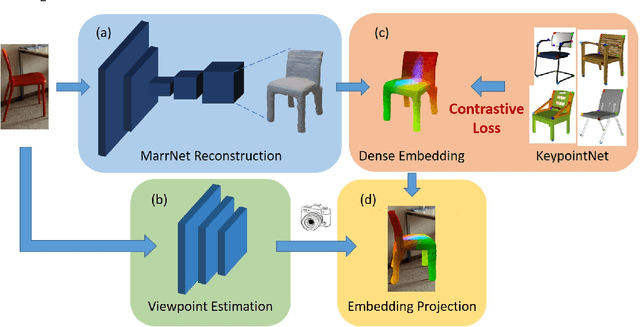
Pixel-level 2D object semantic understanding is an important topic in computer vision and could help machine deeply understand objects (e.g. functionality and affordance) in our daily life. However, most previous methods directly train on correspondences in 2D images, which is end-to-end but loses plenty of information in 3D spaces. In this paper, we propose a new method on predicting image corresponding semantics in 3D domain and then projecting them back onto 2D images to achieve pixel-level understanding. In order to obtain reliable 3D semantic labels that are absent in current image datasets, we build a large scale keypoint knowledge engine called KeypointNet, which contains 103,450 keypoints and 8,234 3D models from 16 object categories. Our method leverages the advantages in 3D vision and can explicitly reason about objects self-occlusion and visibility. We show that our method gives comparative and even superior results on standard semantic benchmarks.