 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSuperLine3D: Self-supervised Line Segmentation and Description for LiDAR Point Cloud
Paper and Code
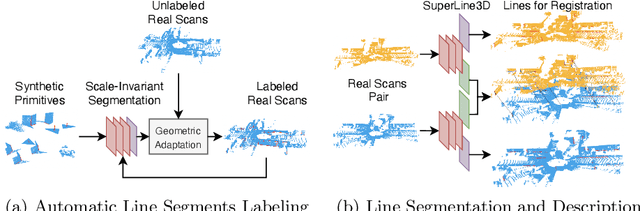
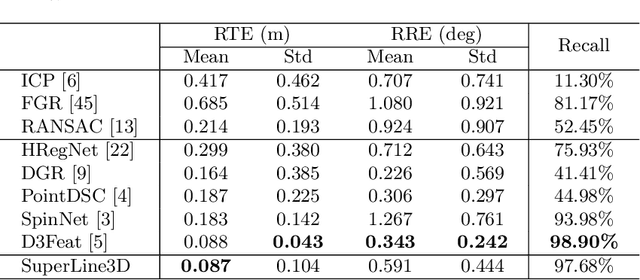
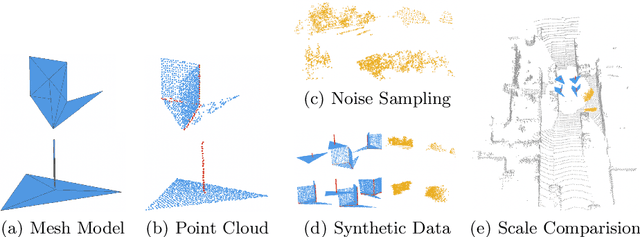

Poles and building edges are frequently observable objects on urban roads, conveying reliable hints for various computer vision tasks. To repetitively extract them as features and perform association between discrete LiDAR frames for registration, we propose the first learning-based feature segmentation and description model for 3D lines in LiDAR point cloud. To train our model without the time consuming and tedious data labeling process, we first generate synthetic primitives for the basic appearance of target lines, and build an iterative line auto-labeling process to gradually refine line labels on real LiDAR scans. Our segmentation model can extract lines under arbitrary scale perturbations, and we use shared EdgeConv encoder layers to train the two segmentation and descriptor heads jointly. Base on the model, we can build a highly-available global registration module for point cloud registration, in conditions without initial transformation hints. Experiments have demonstrated that our line-based registration method is highly competitive to state-of-the-art point-based approaches. Our code is available at https://github.com/zxrzju/SuperLine3D.git.