 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSocially Aware Robot Crowd Navigation with Interaction Graphs and Human Trajectory Prediction
Paper and Code
Mar 03, 2022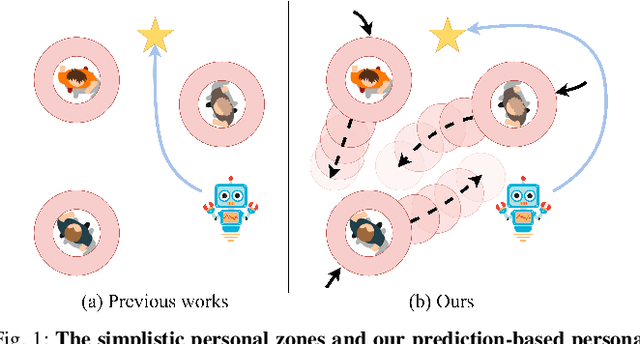
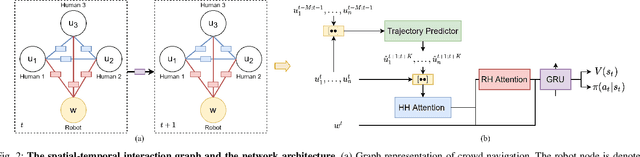
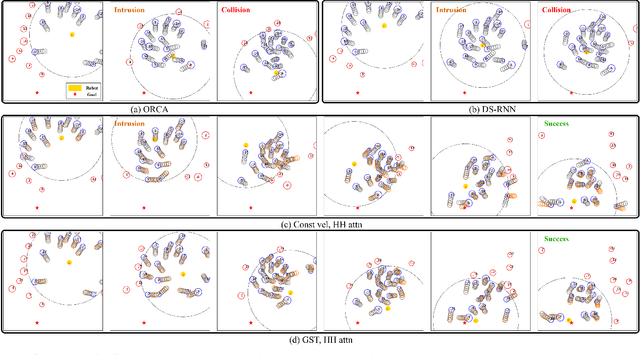

We study the problem of safe and socially aware robot navigation in dense and interactive human crowds. Previous works use simplified methods to model the personal spaces of pedestrians and ignore the social compliance of the robot behaviors. In this paper, we provide a more accurate representation of personal zones of walking pedestrians with their future trajectories. The predicted personal zones are incorporated into a reinforcement learning framework to prevent the robot from intruding into the personal zones. To learn socially aware navigation policies, we propose a novel recurrent graph neural network with attention mechanisms to capture the interactions among agents through space and time. We demonstrate that our method enables the robot to achieve good navigation performance and non-invasiveness in challenging crowd navigation scenarios. We successfully transfer the policy learned in the simulator to a real-world TurtleBot 2i.