 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSINet: A Scale-insensitive Convolutional Neural Network for Fast Vehicle Detection
Paper and Code
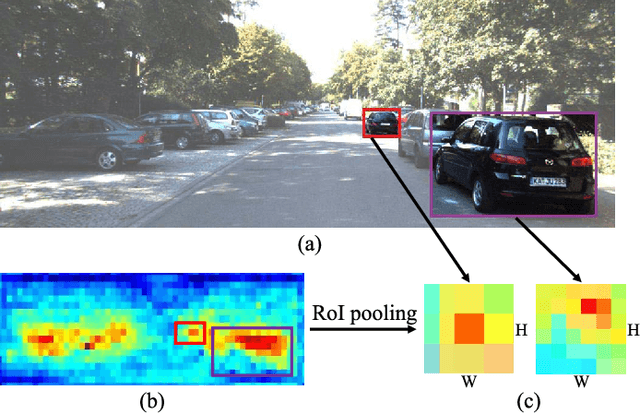
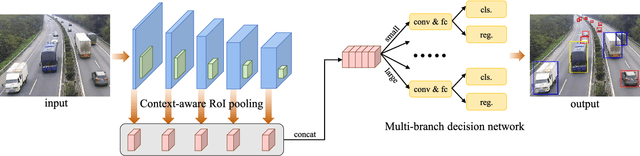
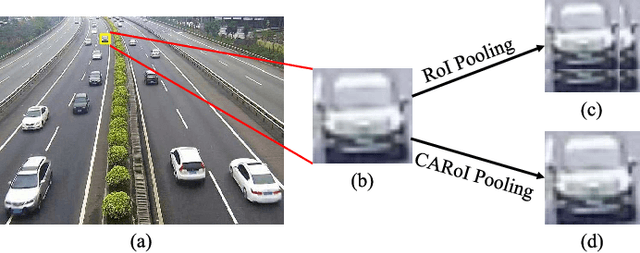

Vision-based vehicle detection approaches achieve incredible success in recent years with the development of deep convolutional neural network (CNN). However, existing CNN based algorithms suffer from the problem that the convolutional features are scale-sensitive in object detection task but it is common that traffic images and videos contain vehicles with a large variance of scales. In this paper, we delve into the source of scale sensitivity, and reveal two key issues: 1) existing RoI pooling destroys the structure of small scale objects, 2) the large intra-class distance for a large variance of scales exceeds the representation capability of a single network. Based on these findings, we present a scale-insensitive convolutional neural network (SINet) for fast detecting vehicles with a large variance of scales. First, we present a context-aware RoI pooling to maintain the contextual information and original structure of small scale objects. Second, we present a multi-branch decision network to minimize the intra-class distance of features. These lightweight techniques bring zero extra time complexity but prominent detection accuracy improvement. The proposed techniques can be equipped with any deep network architectures and keep them trained end-to-end. Our SINet achieves state-of-the-art performance in terms of accuracy and speed (up to 37 FPS) on the KITTI benchmark and a new highway dataset, which contains a large variance of scales and extremely small objects.