 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSim-to-Real via Sim-to-Seg: End-to-end Off-road Autonomous Driving Without Real Data
Paper and Code
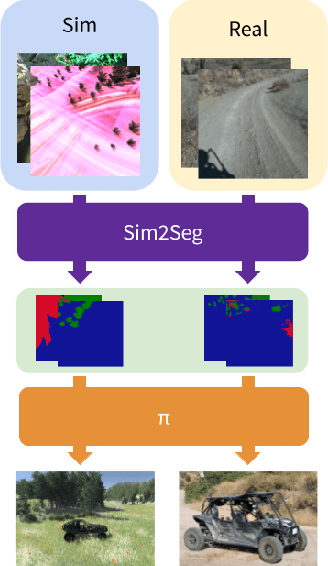
Autonomous driving is complex, requiring sophisticated 3D scene understanding, localization, mapping, and control. Rather than explicitly modelling and fusing each of these components, we instead consider an end-to-end approach via reinforcement learning (RL). However, collecting exploration driving data in the real world is impractical and dangerous. While training in simulation and deploying visual sim-to-real techniques has worked well for robot manipulation, deploying beyond controlled workspace viewpoints remains a challenge. In this paper, we address this challenge by presenting Sim2Seg, a re-imagining of RCAN that crosses the visual reality gap for off-road autonomous driving, without using any real-world data. This is done by learning to translate randomized simulation images into simulated segmentation and depth maps, subsequently enabling real-world images to also be translated. This allows us to train an end-to-end RL policy in simulation, and directly deploy in the real-world. Our approach, which can be trained in 48 hours on 1 GPU, can perform equally as well as a classical perception and control stack that took thousands of engineering hours over several months to build. We hope this work motivates future end-to-end autonomous driving research.