 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRope3D: TheRoadside Perception Dataset for Autonomous Driving and Monocular 3D Object Detection Task
Paper and Code
Mar 25, 2022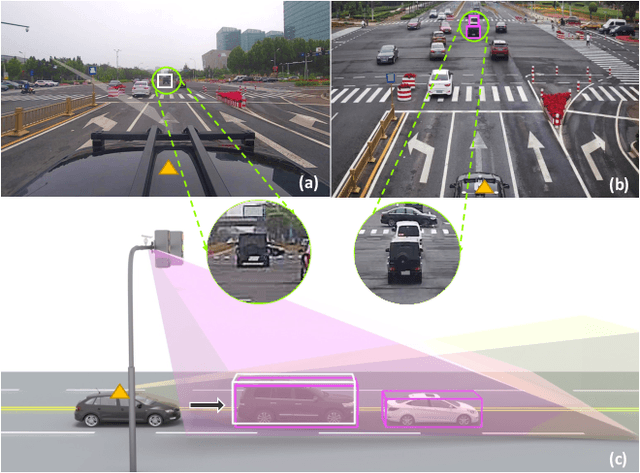
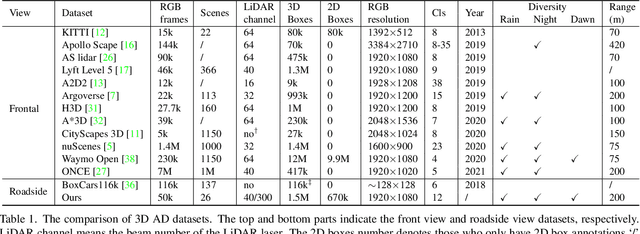
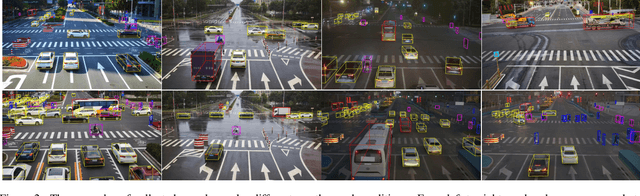
Concurrent perception datasets for autonomous driving are mainly limited to frontal view with sensors mounted on the vehicle. None of them is designed for the overlooked roadside perception tasks. On the other hand, the data captured from roadside cameras have strengths over frontal-view data, which is believed to facilitate a safer and more intelligent autonomous driving system. To accelerate the progress of roadside perception, we present the first high-diversity challenging Roadside Perception 3D dataset- Rope3D from a novel view. The dataset consists of 50k images and over 1.5M 3D objects in various scenes, which are captured under different settings including various cameras with ambiguous mounting positions, camera specifications, viewpoints, and different environmental conditions. We conduct strict 2D-3D joint annotation and comprehensive data analysis, as well as set up a new 3D roadside perception benchmark with metrics and evaluation devkit. Furthermore, we tailor the existing frontal-view monocular 3D object detection approaches and propose to leverage the geometry constraint to solve the inherent ambiguities caused by various sensors, viewpoints. Our dataset is available on https://thudair.baai.ac.cn/rope.