 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProMotion: Prototypes As Motion Learners
Paper and Code
Jun 07, 2024

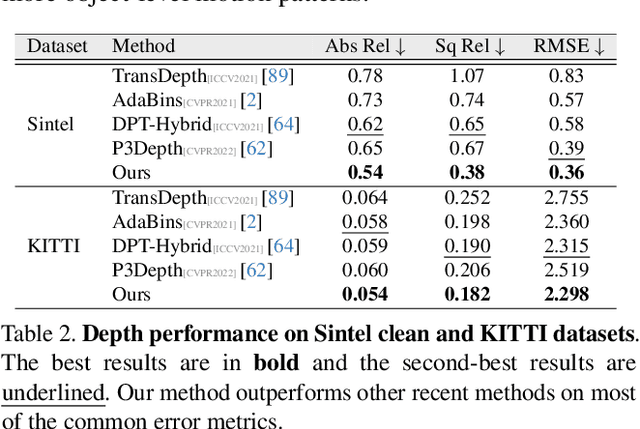

In this work, we introduce ProMotion, a unified prototypical framework engineered to model fundamental motion tasks. ProMotion offers a range of compelling attributes that set it apart from current task-specific paradigms. We adopt a prototypical perspective, establishing a unified paradigm that harmonizes disparate motion learning approaches. This novel paradigm streamlines the architectural design, enabling the simultaneous assimilation of diverse motion information. We capitalize on a dual mechanism involving the feature denoiser and the prototypical learner to decipher the intricacies of motion. This approach effectively circumvents the pitfalls of ambiguity in pixel-wise feature matching, significantly bolstering the robustness of motion representation. We demonstrate a profound degree of transferability across distinct motion patterns. This inherent versatility reverberates robustly across a comprehensive spectrum of both 2D and 3D downstream tasks. Empirical results demonstrate that ProMotion outperforms various well-known specialized architectures, achieving 0.54 and 0.054 Abs Rel error on the Sintel and KITTI depth datasets, 1.04 and 2.01 average endpoint error on the clean and final pass of Sintel flow benchmark, and 4.30 F1-all error on the KITTI flow benchmark. For its efficacy, we hope our work can catalyze a paradigm shift in universal models in computer vision.