 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePose for Everything: Towards Category-Agnostic Pose Estimation
Paper and Code
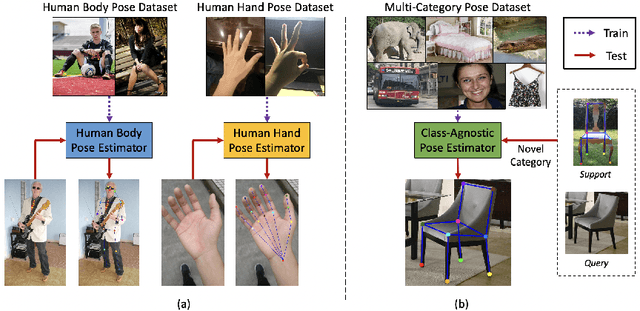
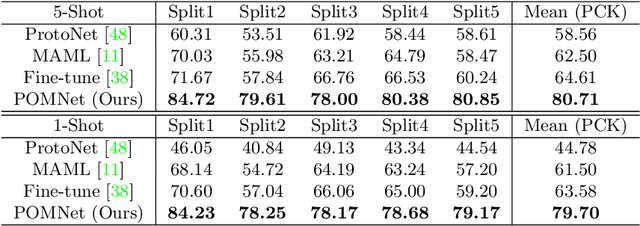
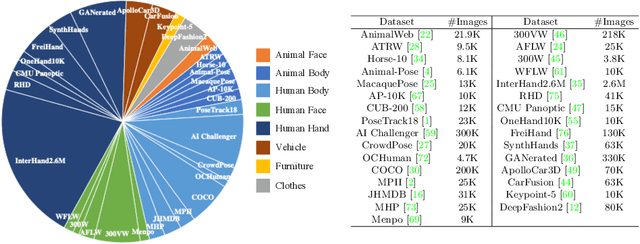

Existing works on 2D pose estimation mainly focus on a certain category, e.g. human, animal, and vehicle. However, there are lots of application scenarios that require detecting the poses/keypoints of the unseen class of objects. In this paper, we introduce the task of Category-Agnostic Pose Estimation (CAPE), which aims to create a pose estimation model capable of detecting the pose of any class of object given only a few samples with keypoint definition. To achieve this goal, we formulate the pose estimation problem as a keypoint matching problem and design a novel CAPE framework, termed POse Matching Network (POMNet). A transformer-based Keypoint Interaction Module (KIM) is proposed to capture both the interactions among different keypoints and the relationship between the support and query images. We also introduce Multi-category Pose (MP-100) dataset, which is a 2D pose dataset of 100 object categories containing over 20K instances and is well-designed for developing CAPE algorithms. Experiments show that our method outperforms other baseline approaches by a large margin. Codes and data are available at https://github.com/luminxu/Pose-for-Everything.