 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePETRv2: A Unified Framework for 3D Perception from Multi-Camera Images
Paper and Code
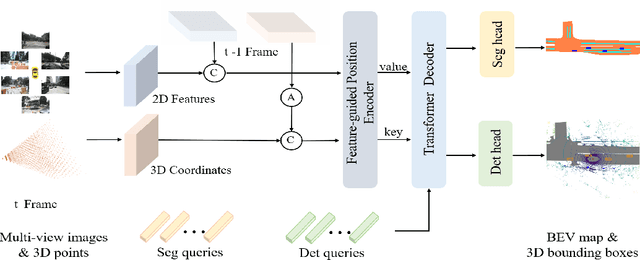
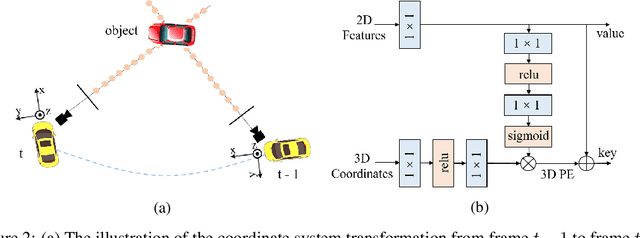
In this paper, we propose PETRv2, a unified framework for 3D perception from multi-view images. Based on PETR, PETRv2 explores the effectiveness of temporal modeling, which utilizes the temporal information of previous frames to boost 3D object detection. More specifically, we extend the 3D position embedding (3D PE) in PETR for temporal modeling. The 3D PE achieves the temporal alignment on object position of different frames. A feature-guided position encoder is further introduced to improve the data adaptability of 3D PE. To support for high-quality BEV segmentation, PETRv2 provides a simply yet effective solution by adding a set of segmentation queries. Each segmentation query is responsible for segmenting one specific patch of BEV map. PETRv2 achieves state-of-the-art performance on 3D object detection and BEV segmentation. Detailed robustness analysis is also conducted on PETR framework. We hope PETRv2 can serve as a unified framework for 3D perception.