 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing the Placement of Roadside LiDARs for Autonomous Driving
Paper and Code
Oct 11, 2023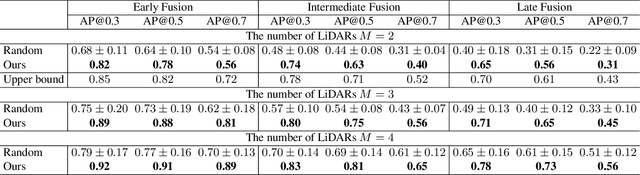
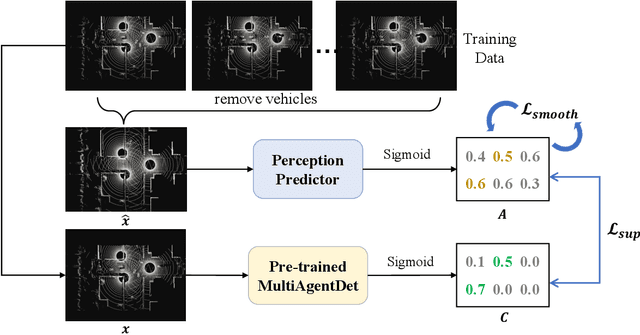
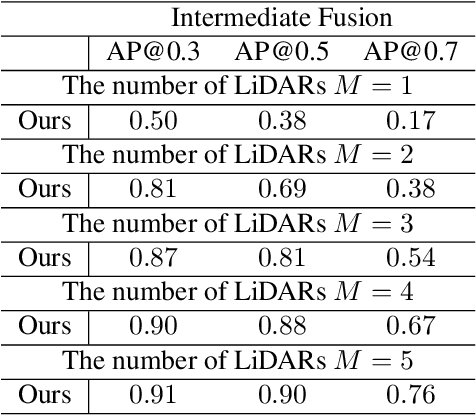
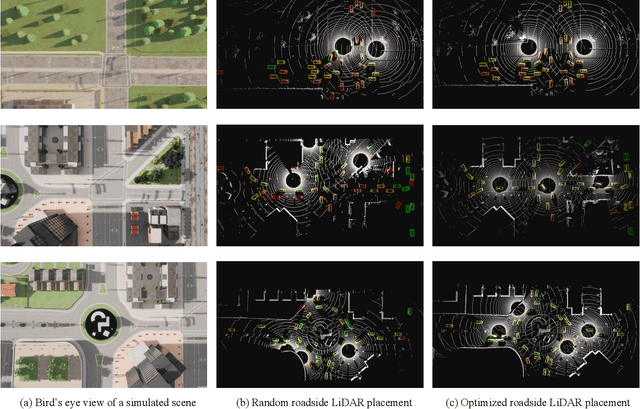
Multi-agent cooperative perception is an increasingly popular topic in the field of autonomous driving, where roadside LiDARs play an essential role. However, how to optimize the placement of roadside LiDARs is a crucial but often overlooked problem. This paper proposes an approach to optimize the placement of roadside LiDARs by selecting optimized positions within the scene for better perception performance. To efficiently obtain the best combination of locations, a greedy algorithm based on perceptual gain is proposed, which selects the location that can maximize the perceptual gain sequentially. We define perceptual gain as the increased perceptual capability when a new LiDAR is placed. To obtain the perception capability, we propose a perception predictor that learns to evaluate LiDAR placement using only a single point cloud frame. A dataset named Roadside-Opt is created using the CARLA simulator to facilitate research on the roadside LiDAR placement problem.