 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOne Million Scenes for Autonomous Driving: ONCE Dataset
Paper and Code

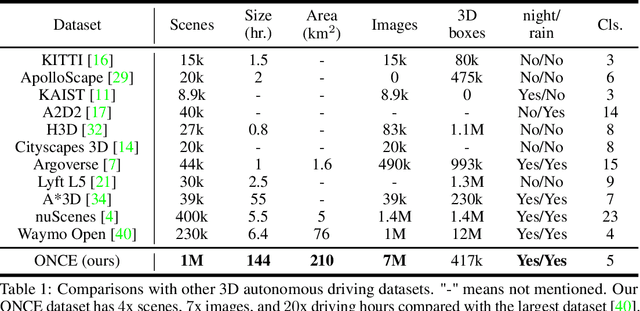

Current perception models in autonomous driving have become notorious for greatly relying on a mass of annotated data to cover unseen cases and address the long-tail problem. On the other hand, learning from unlabeled large-scale collected data and incrementally self-training powerful recognition models have received increasing attention and may become the solutions of next-generation industry-level powerful and robust perception models in autonomous driving. However, the research community generally suffered from data inadequacy of those essential real-world scene data, which hampers the future exploration of fully/semi/self-supervised methods for 3D perception. In this paper, we introduce the ONCE (One millioN sCenEs) dataset for 3D object detection in the autonomous driving scenario. The ONCE dataset consists of 1 million LiDAR scenes and 7 million corresponding camera images. The data is selected from 144 driving hours, which is 20x longer than the largest 3D autonomous driving dataset available (e.g. nuScenes and Waymo), and it is collected across a range of different areas, periods and weather conditions. To facilitate future research on exploiting unlabeled data for 3D detection, we additionally provide a benchmark in which we reproduce and evaluate a variety of self-supervised and semi-supervised methods on the ONCE dataset. We conduct extensive analyses on those methods and provide valuable observations on their performance related to the scale of used data. Data, code, and more information are available at https://once-for-auto-driving.github.io/index.html.