 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMemory-Constrained Policy Optimization
Paper and Code
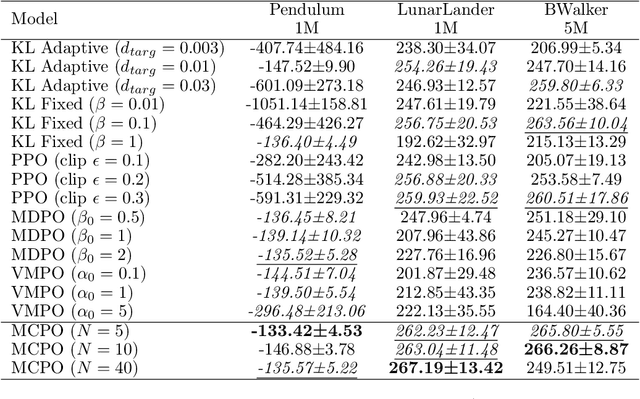

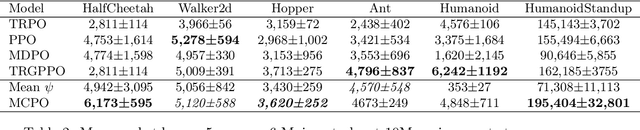
We introduce a new constrained optimization method for policy gradient reinforcement learning, which uses two trust regions to regulate each policy update. In addition to using the proximity of one single old policy as the first trust region as done by prior works, we propose to form a second trust region through the construction of another virtual policy that represents a wide range of past policies. We then enforce the new policy to stay closer to the virtual policy, which is beneficial in case the old policy performs badly. More importantly, we propose a mechanism to automatically build the virtual policy from a memory buffer of past policies, providing a new capability for dynamically selecting appropriate trust regions during the optimization process. Our proposed method, dubbed as Memory-Constrained Policy Optimization (MCPO), is examined on a diverse suite of environments including robotic locomotion control, navigation with sparse rewards and Atari games, consistently demonstrating competitive performance against recent on-policy constrained policy gradient methods.