 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLoss Rank Mining: A General Hard Example Mining Method for Real-time Detectors
Paper and Code
Apr 10, 2018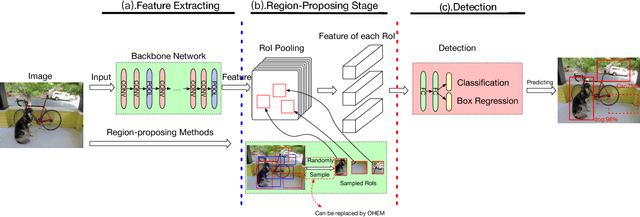



Modern object detectors usually suffer from low accuracy issues, as foregrounds always drown in tons of backgrounds and become hard examples during training. Compared with those proposal-based ones, real-time detectors are in far more serious trouble since they renounce the use of region-proposing stage which is used to filter a majority of backgrounds for achieving real-time rates. Though foregrounds as hard examples are in urgent need of being mined from tons of backgrounds, a considerable number of state-of-the-art real-time detectors, like YOLO series, have yet to profit from existing hard example mining methods, as using these methods need detectors fit series of prerequisites. In this paper, we propose a general hard example mining method named Loss Rank Mining (LRM) to fill the gap. LRM is a general method for real-time detectors, as it utilizes the final feature map which exists in all real-time detectors to mine hard examples. By using LRM, some elements representing easy examples in final feature map are filtered and detectors are forced to concentrate on hard examples during training. Extensive experiments validate the effectiveness of our method. With our method, the improvements of YOLOv2 detector on auto-driving related dataset KITTI and more general dataset PASCAL VOC are over 5% and 2% mAP, respectively. In addition, LRM is the first hard example mining strategy which could fit YOLOv2 perfectly and make it better applied in series of real scenarios where both real-time rates and accurate detection are strongly demanded.