 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIterative Robust Visual Grounding with Masked Reference based Centerpoint Supervision
Paper and Code
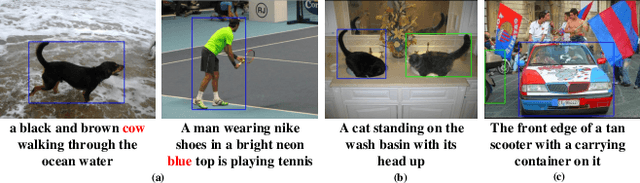



Visual Grounding (VG) aims at localizing target objects from an image based on given expressions and has made significant progress with the development of detection and vision transformer. However, existing VG methods tend to generate false-alarm objects when presented with inaccurate or irrelevant descriptions, which commonly occur in practical applications. Moreover, existing methods fail to capture fine-grained features, accurate localization, and sufficient context comprehension from the whole image and textual descriptions. To address both issues, we propose an Iterative Robust Visual Grounding (IR-VG) framework with Masked Reference based Centerpoint Supervision (MRCS). The framework introduces iterative multi-level vision-language fusion (IMVF) for better alignment. We use MRCS to ahieve more accurate localization with point-wised feature supervision. Then, to improve the robustness of VG, we also present a multi-stage false-alarm sensitive decoder (MFSD) to prevent the generation of false-alarm objects when presented with inaccurate expressions. The proposed framework is evaluated on five regular VG datasets and two newly constructed robust VG datasets. Extensive experiments demonstrate that IR-VG achieves new state-of-the-art (SOTA) results, with improvements of 25\% and 10\% compared to existing SOTA approaches on the two newly proposed robust VG datasets. Moreover, the proposed framework is also verified effective on five regular VG datasets. Codes and models will be publicly at https://github.com/cv516Buaa/IR-VG.