 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvestigating the Properties of Neural Network Representations in Reinforcement Learning
Paper and Code
Mar 30, 2022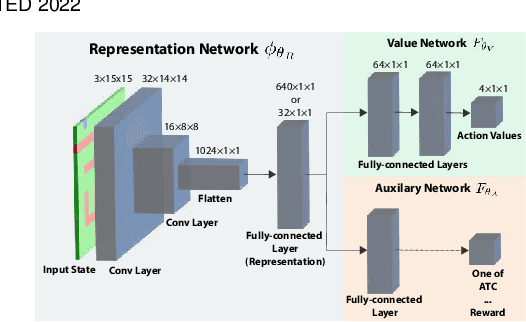
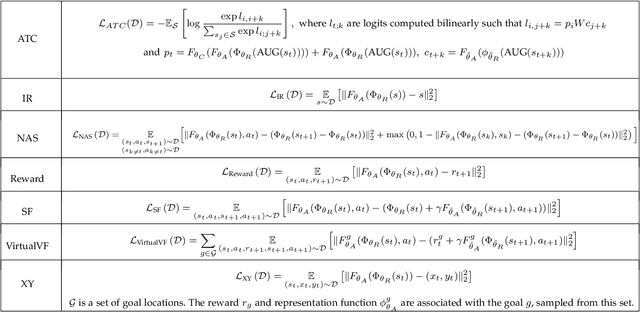
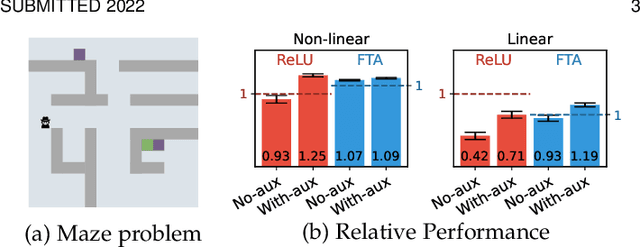

In this paper we investigate the properties of representations learned by deep reinforcement learning systems. Much of the earlier work in representation learning for reinforcement learning focused on designing fixed-basis architectures to achieve properties thought to be desirable, such as orthogonality and sparsity. In contrast, the idea behind deep reinforcement learning methods is that the agent designer should not encode representational properties, but rather that the data stream should determine the properties of the representation -- good representations emerge under appropriate training schemes. In this paper we bring these two perspectives together, empirically investigating the properties of representations that support transfer in reinforcement learning. This analysis allows us to provide novel hypotheses regarding impact of auxiliary tasks in end-to-end training of non-linear reinforcement learning methods. We introduce and measure six representational properties over more than 25 thousand agent-task settings. We consider DQN agents with convolutional networks in a pixel-based navigation environment. We develop a method to better understand \emph{why} some representations work better for transfer, through a systematic approach varying task similarity and measuring and correlating representation properties with transfer performance.