 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteraction Pattern Disentangling for Multi-Agent Reinforcement Learning
Paper and Code
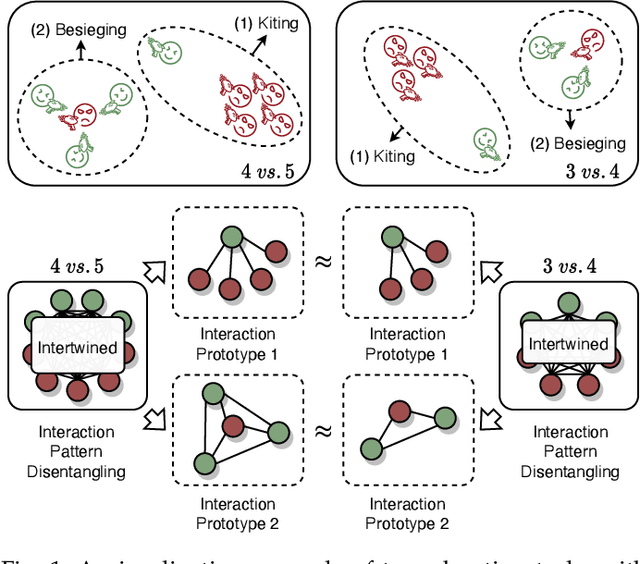

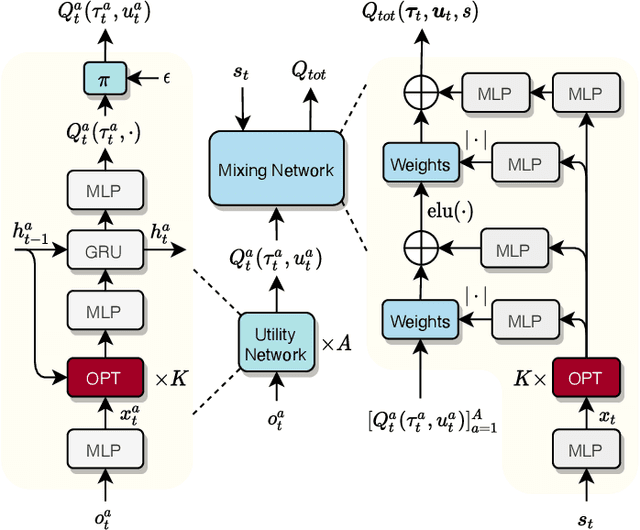
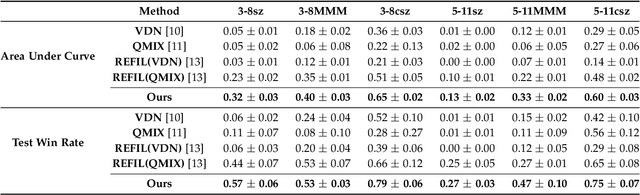
Deep cooperative multi-agent reinforcement learning has demonstrated its remarkable success over a wide spectrum of complex control tasks. However, recent advances in multi-agent learning mainly focus on value decomposition while leaving entity interactions still intertwined, which easily leads to over-fitting on noisy interactions between entities. In this work, we introduce a novel interactiOn Pattern disenTangling (OPT) method, to disentangle not only the joint value function into agent-wise value functions for decentralized execution, but also the entity interactions into interaction prototypes, each of which represents an underlying interaction pattern within a sub-group of the entities. OPT facilitates filtering the noisy interactions between irrelevant entities and thus significantly improves generalizability as well as interpretability. Specifically, OPT introduces a sparse disagreement mechanism to encourage sparsity and diversity among discovered interaction prototypes. Then the model selectively restructures these prototypes into a compact interaction pattern by an aggregator with learnable weights. To alleviate the training instability issue caused by partial observability, we propose to maximize the mutual information between the aggregation weights and the history behaviors of each agent. Experiments on both single-task and multi-task benchmarks demonstrate that the proposed method yields results superior to the state-of-the-art counterparts. Our code will be made publicly available.