 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplicit Autoencoder for Point Cloud Self-supervised Representation Learning
Paper and Code
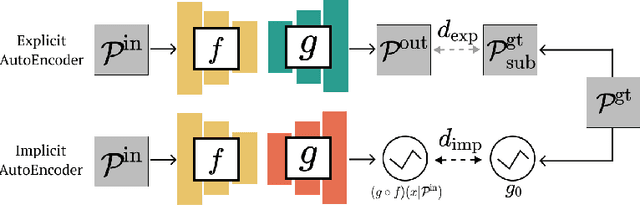
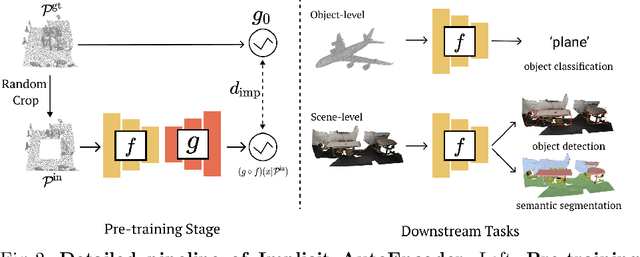
Many 3D representations (e.g., point clouds) are discrete samples of the underlying continuous 3D surface. This process inevitably introduces sampling variations on the underlying 3D shapes. In learning 3D representation, the variations should be disregarded while transferable knowledge of the underlying 3D shape should be captured. This becomes a grand challenge in existing representation learning paradigms. This paper studies autoencoding on point clouds. The standard autoencoding paradigm forces the encoder to capture such sampling variations as the decoder has to reconstruct the original point cloud that has sampling variations. We introduce Implicit Autoencoder(IAE), a simple yet effective method that addresses this challenge by replacing the point cloud decoder with an implicit decoder. The implicit decoder outputs a continuous representation that is shared among different point cloud sampling of the same model. Reconstructing under the implicit representation can prioritize that the encoder discards sampling variations, introducing more space to learn useful features. We theoretically justify this claim under a simple linear autoencoder. Moreover, the implicit decoder offers a rich space to design suitable implicit representations for different tasks. We demonstrate the usefulness of IAE across various self-supervised learning tasks for both 3D objects and 3D scenes. Experimental results show that IAE consistently outperforms the state-of-the-art in each task.