 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHomography Loss for Monocular 3D Object Detection
Paper and Code

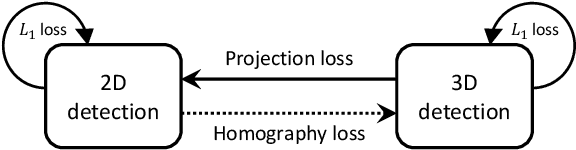
Monocular 3D object detection is an essential task in autonomous driving. However, most current methods consider each 3D object in the scene as an independent training sample, while ignoring their inherent geometric relations, thus inevitably resulting in a lack of leveraging spatial constraints. In this paper, we propose a novel method that takes all the objects into consideration and explores their mutual relationships to help better estimate the 3D boxes. Moreover, since 2D detection is more reliable currently, we also investigate how to use the detected 2D boxes as guidance to globally constrain the optimization of the corresponding predicted 3D boxes. To this end, a differentiable loss function, termed as Homography Loss, is proposed to achieve the goal, which exploits both 2D and 3D information, aiming at balancing the positional relationships between different objects by global constraints, so as to obtain more accurately predicted 3D boxes. Thanks to the concise design, our loss function is universal and can be plugged into any mature monocular 3D detector, while significantly boosting the performance over their baseline. Experiments demonstrate that our method yields the best performance (Nov. 2021) compared with the other state-of-the-arts by a large margin on KITTI 3D datasets.