 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGroup Equivariant BEV for 3D Object Detection
Paper and Code
Apr 26, 2023
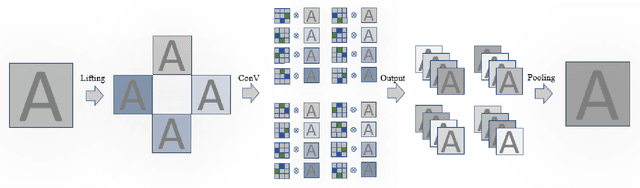
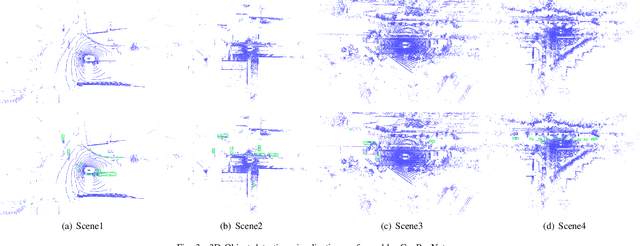
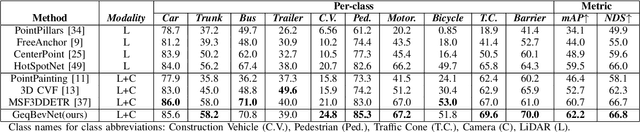
Recently, 3D object detection has attracted significant attention and achieved continuous improvement in real road scenarios. The environmental information is collected from a single sensor or multi-sensor fusion to detect interested objects. However, most of the current 3D object detection approaches focus on developing advanced network architectures to improve the detection precision of the object rather than considering the dynamic driving scenes, where data collected from sensors equipped in the vehicle contain various perturbation features. As a result, existing work cannot still tackle the perturbation issue. In order to solve this problem, we propose a group equivariant bird's eye view network (GeqBevNet) based on the group equivariant theory, which introduces the concept of group equivariant into the BEV fusion object detection network. The group equivariant network is embedded into the fused BEV feature map to facilitate the BEV-level rotational equivariant feature extraction, thus leading to lower average orientation error. In order to demonstrate the effectiveness of the GeqBevNet, the network is verified on the nuScenes validation dataset in which mAOE can be decreased to 0.325. Experimental results demonstrate that GeqBevNet can extract more rotational equivariant features in the 3D object detection of the actual road scene and improve the performance of object orientation prediction.