 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobal Hypothesis Generation for 6D Object Pose Estimation
Paper and Code
Jan 02, 2017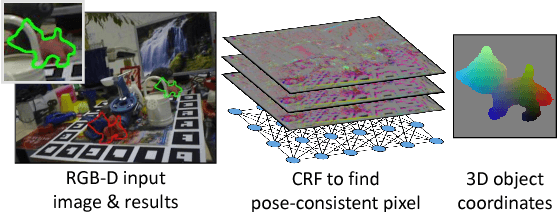
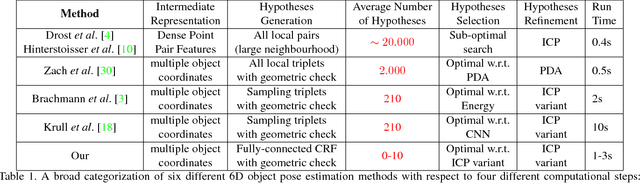
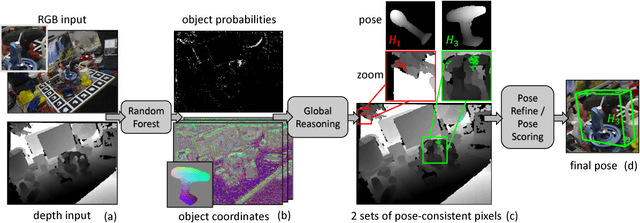
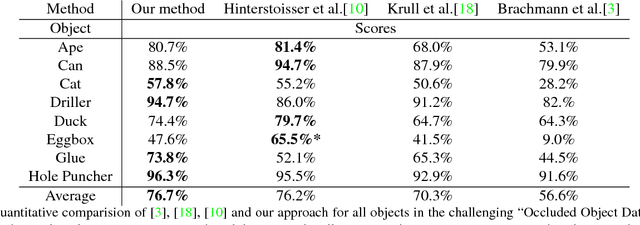
This paper addresses the task of estimating the 6D pose of a known 3D object from a single RGB-D image. Most modern approaches solve this task in three steps: i) Compute local features; ii) Generate a pool of pose-hypotheses; iii) Select and refine a pose from the pool. This work focuses on the second step. While all existing approaches generate the hypotheses pool via local reasoning, e.g. RANSAC or Hough-voting, we are the first to show that global reasoning is beneficial at this stage. In particular, we formulate a novel fully-connected Conditional Random Field (CRF) that outputs a very small number of pose-hypotheses. Despite the potential functions of the CRF being non-Gaussian, we give a new and efficient two-step optimization procedure, with some guarantees for optimality. We utilize our global hypotheses generation procedure to produce results that exceed state-of-the-art for the challenging "Occluded Object Dataset".