 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlockGPT: Guiding UAV Flocking with Linguistic Orchestration
Paper and Code
May 09, 2024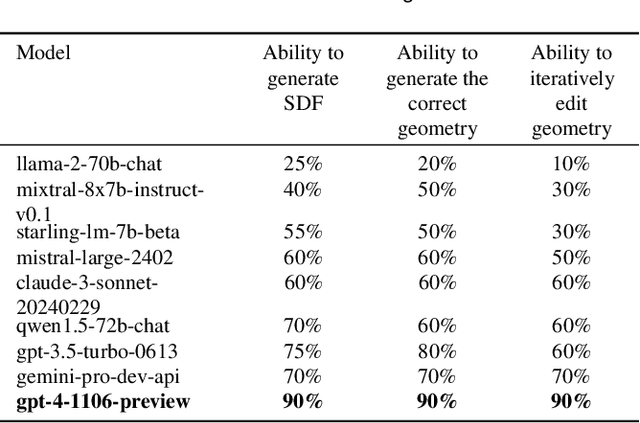
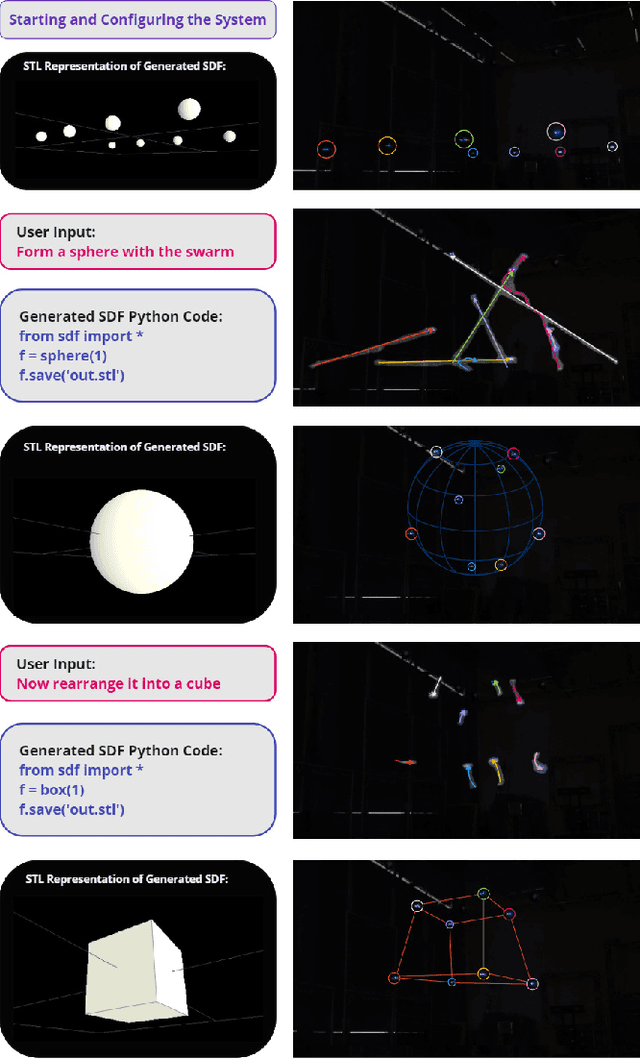
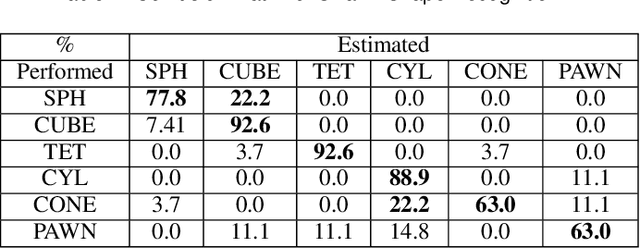
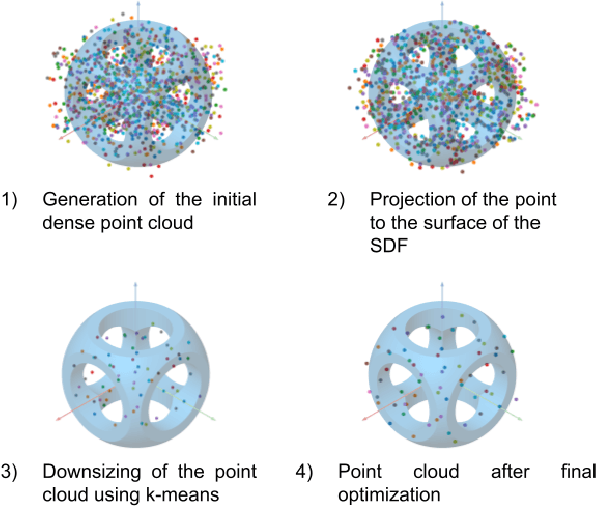
This article presents the world's first rapid drone flocking control using natural language through generative AI. The described approach enables the intuitive orchestration of a flock of any size to achieve the desired geometry. The key feature of the method is the development of a new interface based on Large Language Models to communicate with the user and to generate the target geometry descriptions. Users can interactively modify or provide comments during the construction of the flock geometry model. By combining flocking technology and defining the target surface using a signed distance function, smooth and adaptive movement of the drone swarm between target states is achieved. Our user study on FlockGPT confirmed a high level of intuitive control over drone flocking by users. Subjects who had never previously controlled a swarm of drones were able to construct complex figures in just a few iterations and were able to accurately distinguish the formed swarm drone figures. The results revealed a high recognition rate for six different geometric patterns generated through the LLM-based interface and performed by a simulated drone flock (mean of 80% with a maximum of 93\% for cube and tetrahedron patterns). Users commented on low temporal demand (19.2 score in NASA-TLX), high performance (26 score in NASA-TLX), attractiveness (1.94 UEQ score), and hedonic quality (1.81 UEQ score) of the developed system. The FlockGPT demo code repository can be found at: coming soon