 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast-Grasp'D: Dexterous Multi-finger Grasp Generation Through Differentiable Simulation
Paper and Code
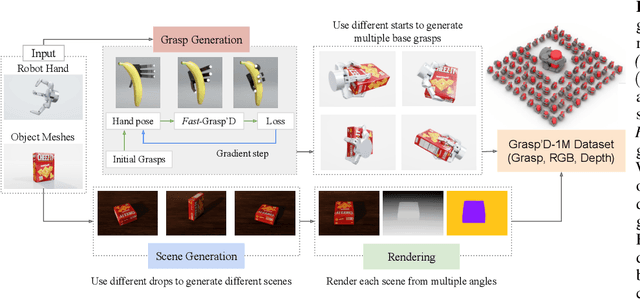
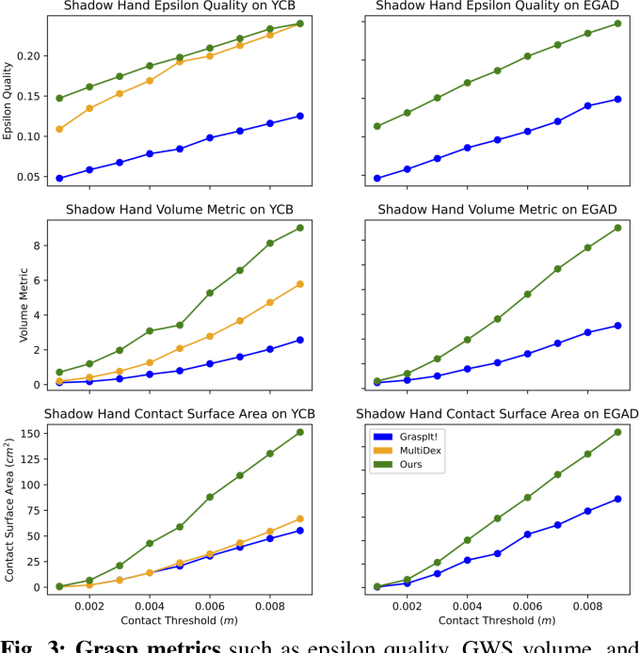
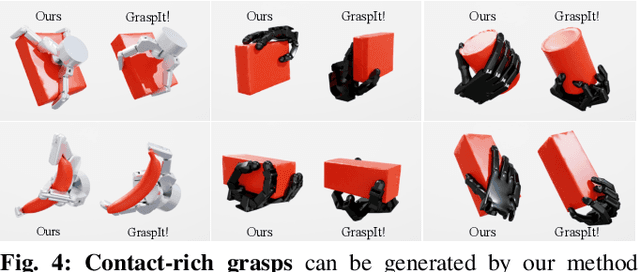

Multi-finger grasping relies on high quality training data, which is hard to obtain: human data is hard to transfer and synthetic data relies on simplifying assumptions that reduce grasp quality. By making grasp simulation differentiable, and contact dynamics amenable to gradient-based optimization, we accelerate the search for high-quality grasps with fewer limiting assumptions. We present Grasp'D-1M: a large-scale dataset for multi-finger robotic grasping, synthesized with Fast- Grasp'D, a novel differentiable grasping simulator. Grasp'D- 1M contains one million training examples for three robotic hands (three, four and five-fingered), each with multimodal visual inputs (RGB+depth+segmentation, available in mono and stereo). Grasp synthesis with Fast-Grasp'D is 10x faster than GraspIt! and 20x faster than the prior Grasp'D differentiable simulator. Generated grasps are more stable and contact-rich than GraspIt! grasps, regardless of the distance threshold used for contact generation. We validate the usefulness of our dataset by retraining an existing vision-based grasping pipeline on Grasp'D-1M, and showing a dramatic increase in model performance, predicting grasps with 30% more contact, a 33% higher epsilon metric, and 35% lower simulated displacement. Additional details at https://dexgrasp.github.io.