 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEntropy Loss: An Interpretability Amplifier of 3D Object Detection Network for Intelligent Driving
Paper and Code
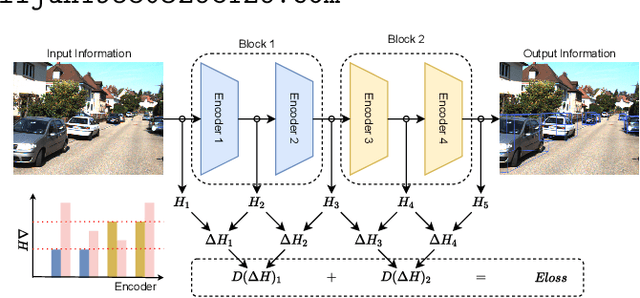
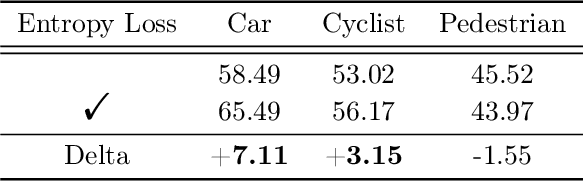
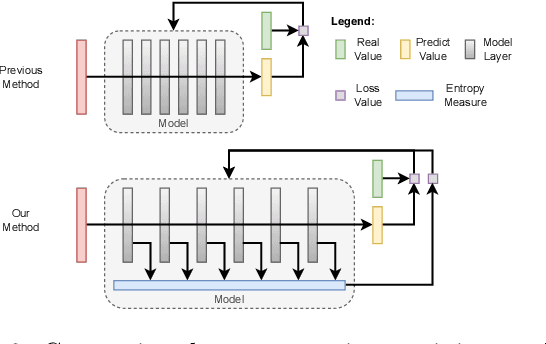
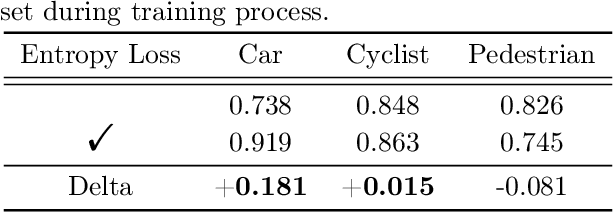
With the increasing complexity of the traffic environment, the significance of safety perception in intelligent driving is intensifying. Traditional methods in the field of intelligent driving perception rely on deep learning, which suffers from limited interpretability, often described as a "black box." This paper introduces a novel type of loss function, termed "Entropy Loss," along with an innovative training strategy. Entropy Loss is formulated based on the functionality of feature compression networks within the perception model. Drawing inspiration from communication systems, the information transmission process in a feature compression network is expected to demonstrate steady changes in information volume and a continuous decrease in information entropy. By modeling network layer outputs as continuous random variables, we construct a probabilistic model that quantifies changes in information volume. Entropy Loss is then derived based on these expectations, guiding the update of network parameters to enhance network interpretability. Our experiments indicate that the Entropy Loss training strategy accelerates the training process. Utilizing the same 60 training epochs, the accuracy of 3D object detection models using Entropy Loss on the KITTI test set improved by up to 4.47\% compared to models without Entropy Loss, underscoring the method's efficacy. The implementation code is available at \url{https://github.com/yhbcode000/Eloss-Interpretability}.