 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDG-Labeler and DGL-MOTS Dataset: Boost the Autonomous Driving Perception
Paper and Code

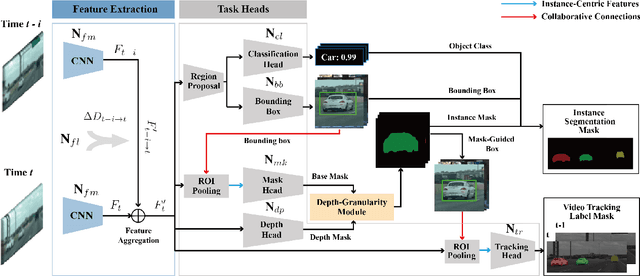
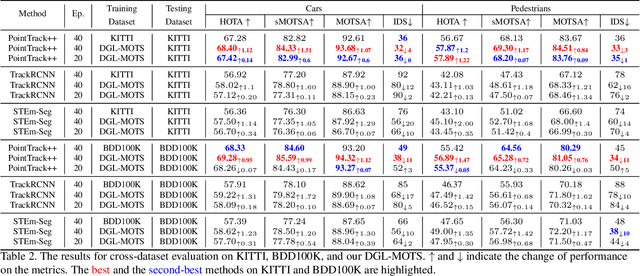
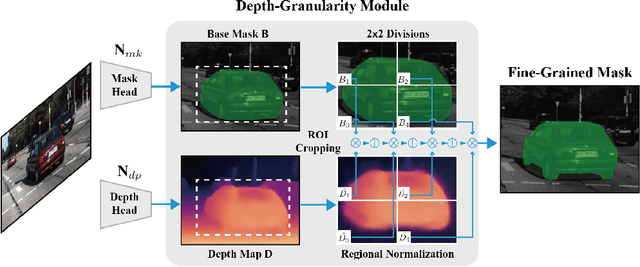
Multi-object tracking and segmentation (MOTS) is a critical task for autonomous driving applications. The existing MOTS studies face two critical challenges: 1) the published datasets inadequately capture the real-world complexity for network training to address various driving settings; 2) the working pipeline annotation tool is under-studied in the literature to improve the quality of MOTS learning examples. In this work, we introduce the DG-Labeler and DGL-MOTS dataset to facilitate the training data annotation for the MOTS task and accordingly improve network training accuracy and efficiency. DG-Labeler uses the novel Depth-Granularity Module to depict the instance spatial relations and produce fine-grained instance masks. Annotated by DG-Labeler, our DGL-MOTS dataset exceeds the prior effort (i.e., KITTI MOTS and BDD100K) in data diversity, annotation quality, and temporal representations. Results on extensive cross-dataset evaluations indicate significant performance improvements for several state-of-the-art methods trained on our DGL-MOTS dataset. We believe our DGL-MOTS Dataset and DG-Labeler hold the valuable potential to boost the visual perception of future transportation.