 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepthSynth: Real-Time Realistic Synthetic Data Generation from CAD Models for 2.5D Recognition
Paper and Code
Nov 28, 2017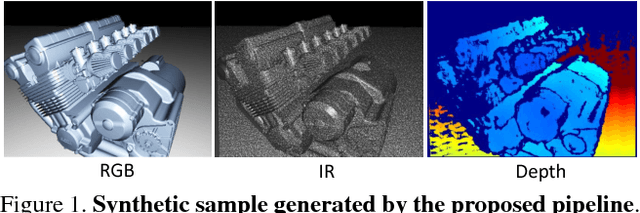
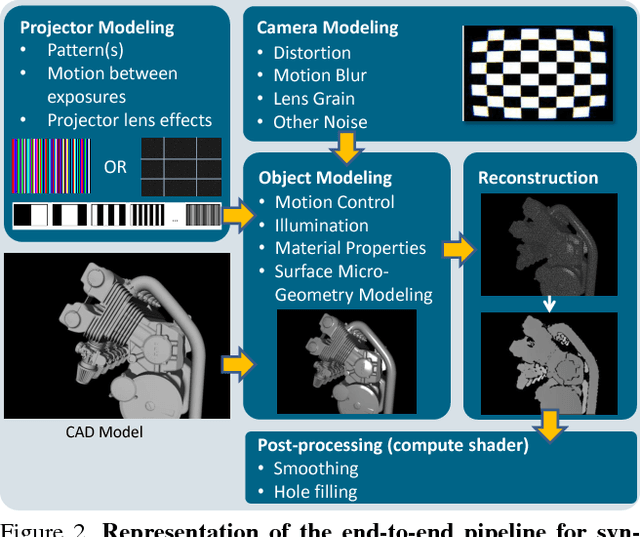
Recent progress in computer vision has been dominated by deep neural networks trained over large amounts of labeled data. Collecting such datasets is however a tedious, often impossible task; hence a surge in approaches relying solely on synthetic data for their training. For depth images however, discrepancies with real scans still noticeably affect the end performance. We thus propose an end-to-end framework which simulates the whole mechanism of these devices, generating realistic depth data from 3D models by comprehensively modeling vital factors e.g. sensor noise, material reflectance, surface geometry. Not only does our solution cover a wider range of sensors and achieve more realistic results than previous methods, assessed through extended evaluation, but we go further by measuring the impact on the training of neural networks for various recognition tasks; demonstrating how our pipeline seamlessly integrates such architectures and consistently enhances their performance.