 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperation without Coordination: Hierarchical Predictive Planning for Decentralized Multiagent Navigation
Paper and Code
Mar 15, 2020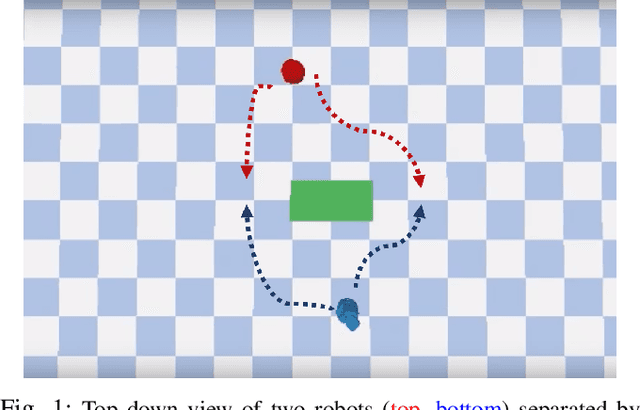
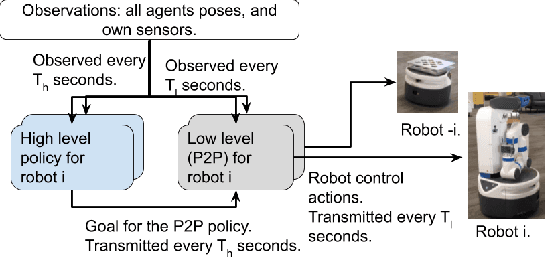
Decentralized multiagent planning raises many challenges, such as adaption to changing environments inexplicable by the agent's own behavior, coordination from noisy sensor inputs like lidar, cooperation without knowing other agents' intents. To address these challenges, we present hierarchical predictive planning (HPP) for decentralized multiagent navigation tasks. HPP learns prediction models for itself and other teammates, and uses the prediction models to propose and evaluate navigation goals that complete the cooperative task without explicit coordination. To learn the prediction models, HPP observes other agents' behavior and learns to maps own sensors to predicted locations of other agents. HPP then uses the cross-entropy method to iteratively propose, evaluate, and improve navigation goals, under assumption that all agents in the team share a common objective. HPP removes the need for a centralized operator (i.e. robots determine their own actions without coordinating their beliefs or plans) and can be trained and easily transferred to real world environments. The results show that HPP generalizes to new environments including real-world robot team. It is also 33x more sample efficient and performs better in complex environments compared to a baseline. The video and website for this paper can be found at https://youtu.be/-LqgfksqNH8 and https://sites.google.com/view/multiagent-hpp.