 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCanonical Capsules: Unsupervised Capsules in Canonical Pose
Paper and Code
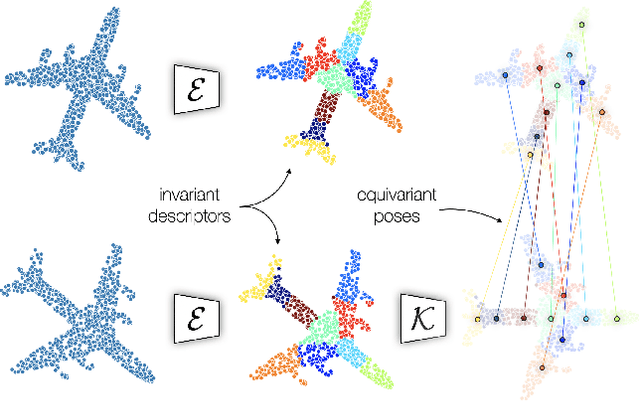
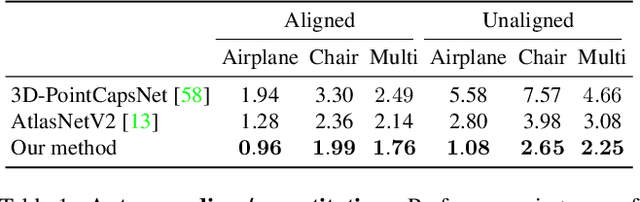

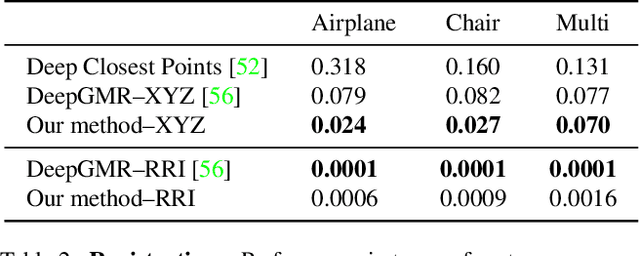
We propose an unsupervised capsule architecture for 3D point clouds. We compute capsule decompositions of objects through permutation-equivariant attention, and self-supervise the process by training with pairs of randomly rotated objects. Our key idea is to aggregate the attention masks into semantic keypoints, and use these to supervise a decomposition that satisfies the capsule invariance/equivariance properties. This not only enables the training of a semantically consistent decomposition, but also allows us to learn a canonicalization operation that enables object-centric reasoning. In doing so, we require neither classification labels nor manually-aligned training datasets to train. Yet, by learning an object-centric representation in an unsupervised manner, our method outperforms the state-of-the-art on 3D point cloud reconstruction, registration, and unsupervised classification. We will release the code and dataset to reproduce our results as soon as the paper is published.