 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBrief Industry Paper: The Necessity of Adaptive Data Fusion in Infrastructure-Augmented Autonomous Driving System
Paper and Code
Jul 02, 2022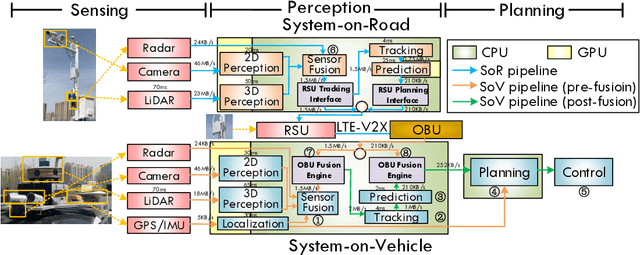



This paper is the first to provide a thorough system design overview along with the fusion methods selection criteria of a real-world cooperative autonomous driving system, named Infrastructure-Augmented Autonomous Driving or IAAD. We present an in-depth introduction of the IAAD hardware and software on both road-side and vehicle-side computing and communication platforms. We extensively characterize the IAAD system in the context of real-world deployment scenarios and observe that the network condition that fluctuates along the road is currently the main technical roadblock for cooperative autonomous driving. To address this challenge, we propose new fusion methods, dubbed "inter-frame fusion" and "planning fusion" to complement the current state-of-the-art "intra-frame fusion". We demonstrate that each fusion method has its own benefit and constraint.