 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBridge Data: Boosting Generalization of Robotic Skills with Cross-Domain Datasets
Paper and Code
Sep 27, 2021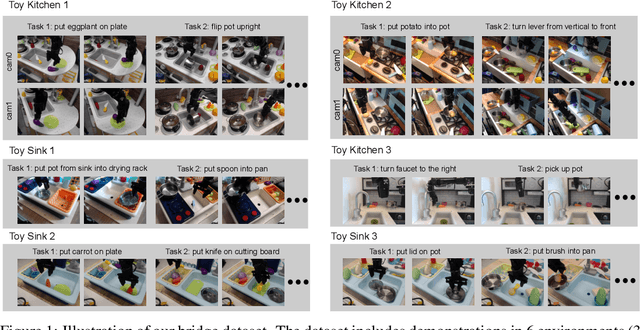
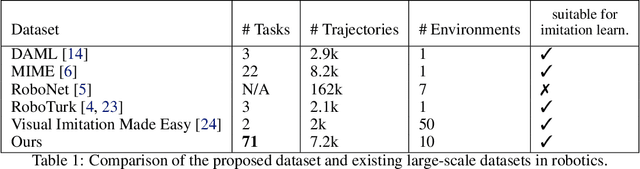
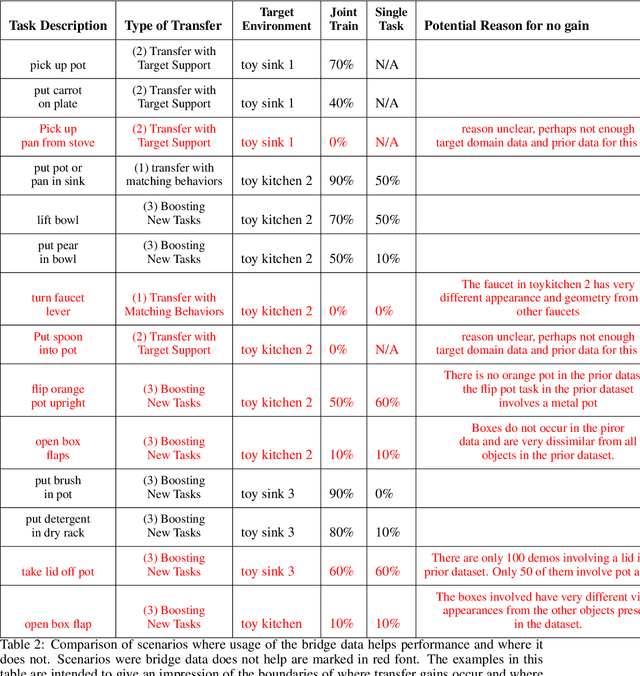
Robot learning holds the promise of learning policies that generalize broadly. However, such generalization requires sufficiently diverse datasets of the task of interest, which can be prohibitively expensive to collect. In other fields, such as computer vision, it is common to utilize shared, reusable datasets, such as ImageNet, to overcome this challenge, but this has proven difficult in robotics. In this paper, we ask: what would it take to enable practical data reuse in robotics for end-to-end skill learning? We hypothesize that the key is to use datasets with multiple tasks and multiple domains, such that a new user that wants to train their robot to perform a new task in a new domain can include this dataset in their training process and benefit from cross-task and cross-domain generalization. To evaluate this hypothesis, we collect a large multi-domain and multi-task dataset, with 7,200 demonstrations constituting 71 tasks across 10 environments, and empirically study how this data can improve the learning of new tasks in new environments. We find that jointly training with the proposed dataset and 50 demonstrations of a never-before-seen task in a new domain on average leads to a 2x improvement in success rate compared to using target domain data alone. We also find that data for only a few tasks in a new domain can bridge the domain gap and make it possible for a robot to perform a variety of prior tasks that were only seen in other domains. These results suggest that reusing diverse multi-task and multi-domain datasets, including our open-source dataset, may pave the way for broader robot generalization, eliminating the need to re-collect data for each new robot learning project.