 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Mobile Robot Navigation in Uneven and Unstructured Indoor Environments
Paper and Code
Oct 28, 2017
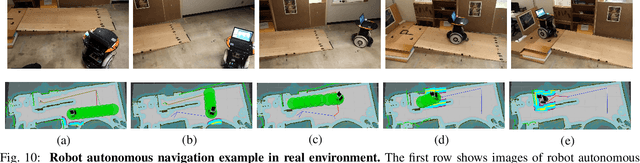
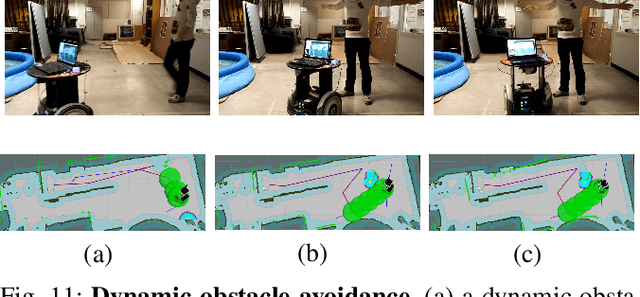
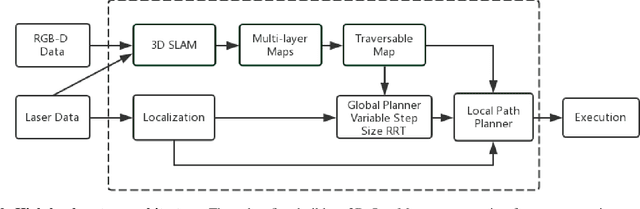
Robots are increasingly operating in indoor environments designed for and shared with people. However, robots working safely and autonomously in uneven and unstructured environments still face great challenges. Many modern indoor environments are designed with wheelchair accessibility in mind. This presents an opportunity for wheeled robots to navigate through sloped areas while avoiding staircases. In this paper, we present an integrated software and hardware system for autonomous mobile robot navigation in uneven and unstructured indoor environments. This modular and reusable software framework incorporates capabilities of perception and navigation. Our robot first builds a 3D OctoMap representation for the uneven environment with the 3D mapping using wheel odometry, 2D laser and RGB-D data. Then we project multilayer 2D occupancy maps from OctoMap to generate the the traversable map based on layer differences. The safe traversable map serves as the input for efficient autonomous navigation. Furthermore, we employ a variable step size Rapidly Exploring Random Trees that could adjust the step size automatically, eliminating tuning step sizes according to environments. We conduct extensive experiments in simulation and real-world, demonstrating the efficacy and efficiency of our system.